2014-01-26
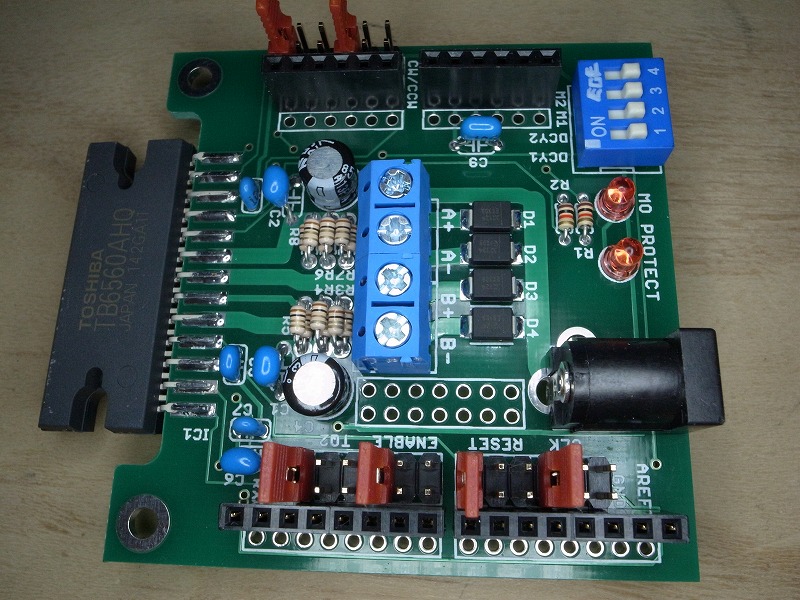
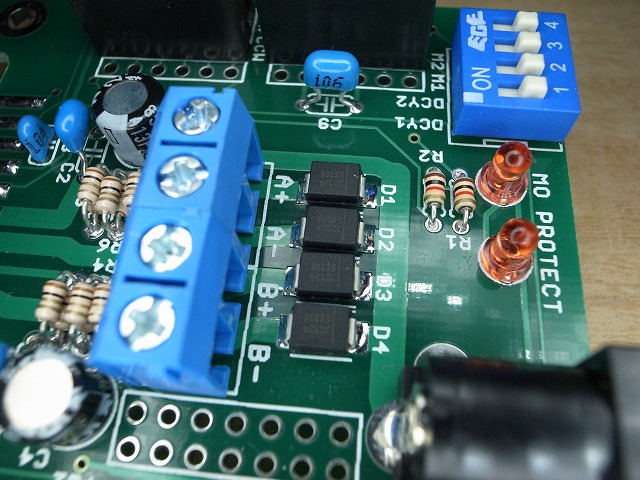
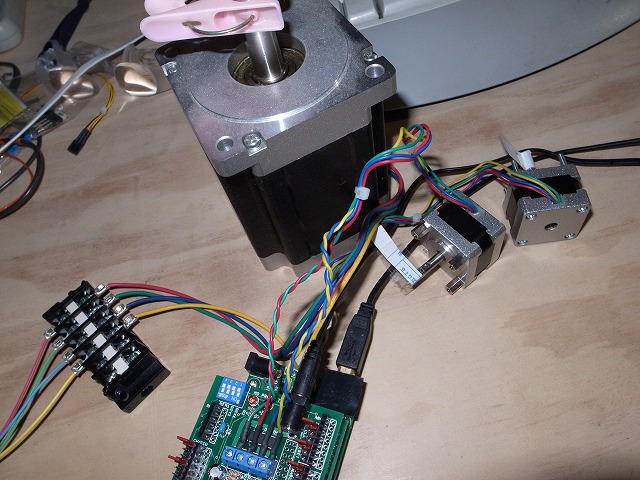
基板表面。
-積み重ねするときはジャンパーピンのつまみが干渉するので切断して下さい
-大電流を長時間流すとICが発熱します。熱くなる場合はヒートシンクを取り付けて下さい。キットにヒートシンクは付属していません。
3mmの穴はヒートシンク固定用です
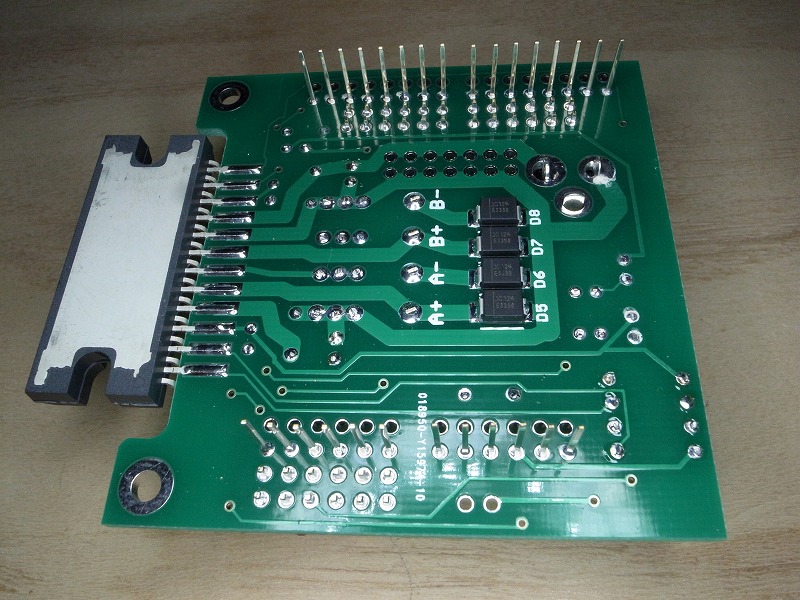
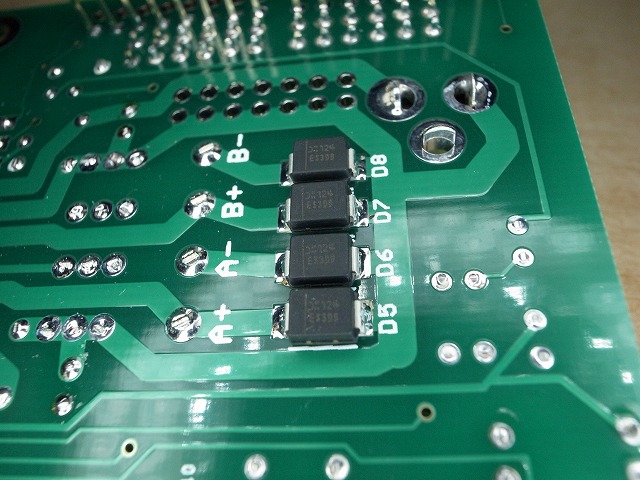
基板裏面。モーター端子の足は積み重ねるとき干渉するので切断して下さい
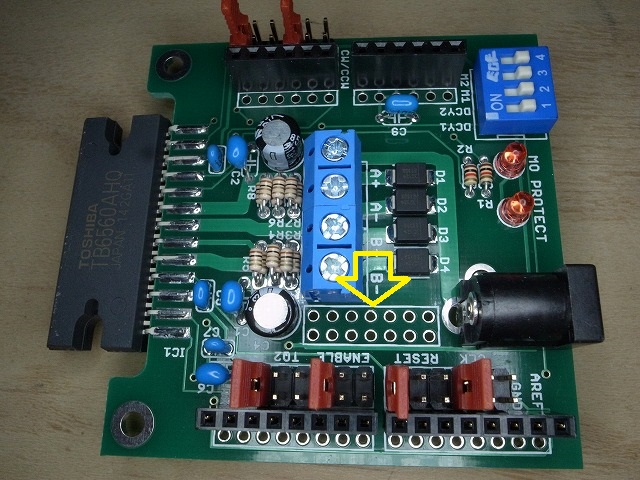
DCジャックはモーター電源用です。モーター電源の能力に余裕があるときは複数のモーターを1つの電源で運転できます。この場合、2X7ピンのピンソケットで基板間の電源を相互に接続します。モーターの消費電力が合計4A以下であればこの方法が使えます。これ以上消費電力が大きいときはピンソケットによる電源供給を使用しないで下さい。基板の配線パターンが発熱します。
複数の電源装置を使用するときはこのソケットを使用してはいけません。電源装置が壊れます。
この写真のジャンパーピンはZ軸用の設定です。Y軸に変更したい場合は全部のジャンパーピンを右隣に移動します。X軸は更にその隣です。
固まって取り付けてある2群の抵抗は電流制限抵抗です。R5側がB相、R8側がA相の電流制限抵抗です。それぞれ同数ずつ取り付ける必要があります。電流値は
1本 - 0.5A
2本 - 1.0A
3本 - 1.5A
4本 - 2.0A
5本 - 2.5A
6本 - 3.0A
7本 - 3.5A
となります。モーターの定格値を満足するように取り付ける本数を決定して下さい。
部品表

面実装品のダイオードはセロハンテープで仮止めしてから半田付けします
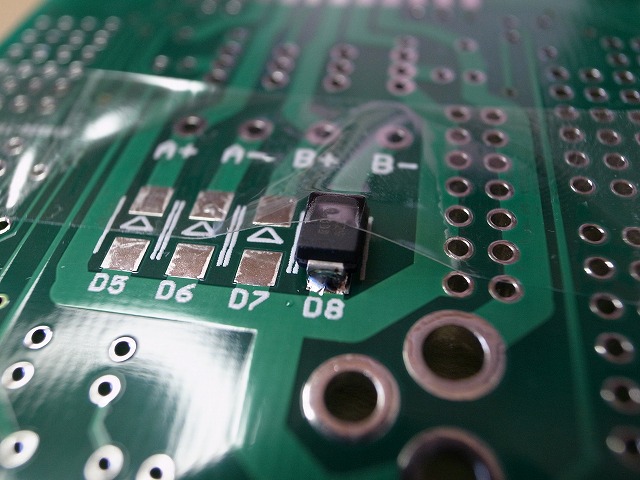
ダイオードの取付向き。表面
ダイオードの取付向き。裏面
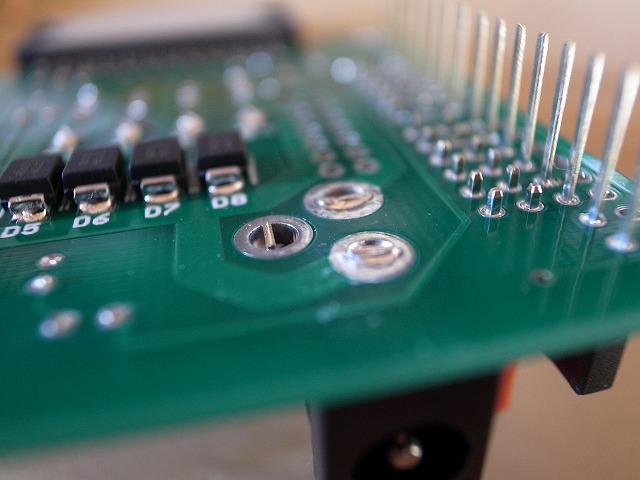
積み重ねるとDCジャックの端子が干渉するので切断して下さい
回路図
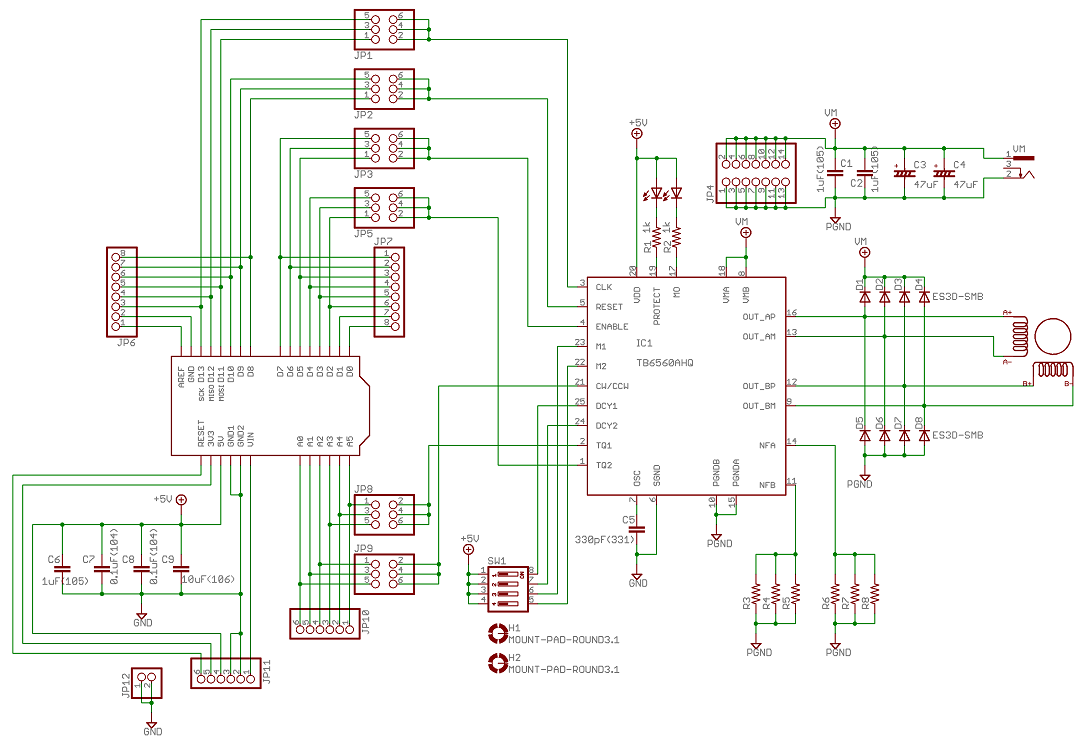
最大3.5Aなので大きなモーターも回せます
***********************************
使い方
***********************************
・マイクロステップ駆動方式は基板上のディップスイッチで行います
SW3:OFF SW4:OFF マイクロステップ無し 1CLKで1ステップ回る
SW3:ON SW4:OFF 1-2相駆動 2CLKで1ステップ分回る
SW3:ON SW4:ON 3ビットマイクロステップ 8CLKで1ステップ分回る
SW3:OFF SW4:ON 4ビットマイクロステップ 16CLKで1ステップ分回る
・SW1,2はオシロスコープを持っている人用です。普通はOFFのまま使います
arduinoのシリアルモニターはフロー制御をしてくれないので専用のプログラムからコマンドを送ります。COMポートに複数の機器が接続されているときはarduinoのポートを選択し、コマンドをテキストエリアに貼り付けRUNを押すと実行されます。RUNを押してから1秒後にコマンドの実行が開始されます。
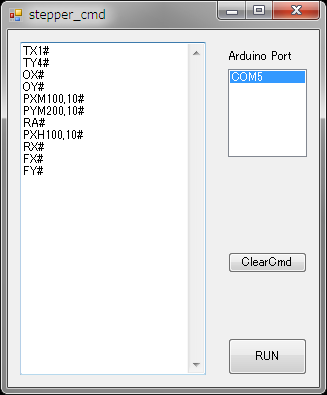
送り込むデータはテキストデータです。
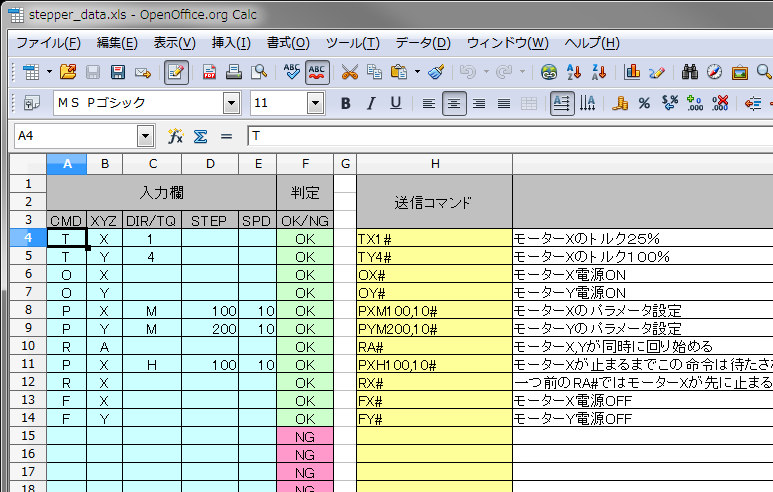
データはテキストエディターで作ることも可能ですがEXCELフォーム(無料のopenofficeでも動きます)で生成するほうが簡単です。
-水色の部分に入力して判定がOKになれば正しい書式のコマンド。間違っていると赤くなる。
-生成された黄色いところのコマンドを選択して上のプログラムに貼り付ければ良い。
コマンドの解説はこのEXCELフォームを参照
arduinoのシリアルモニターを使用するときは
改行無し
115200bps
の設定で送信する。但し処理待ちのコマンドがあると取りこぼしが起こります