2021-01-07
Youtube動画 音響式電子標的 airsoft gun electric target
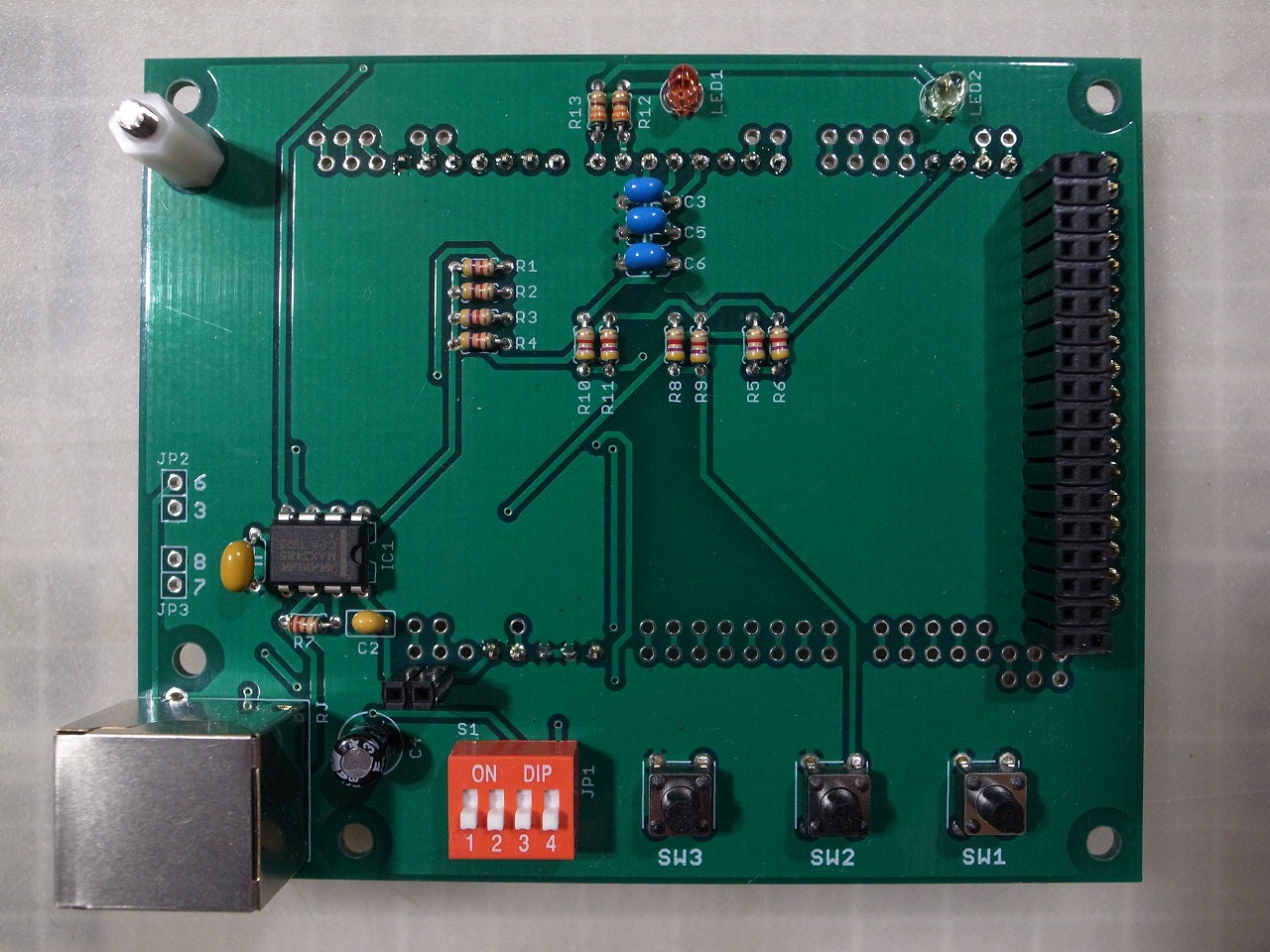
LCD shield adapter TOP view
・LANコネクターの形状はいろいろあるので注意。これは中国製。aliexpressで買った
・LANコネクターを流用しているだけで通信はシリアル。電気的規格はRS485
・RS485はツイストペア線を使うのでLANケーブルを流用するのが安上がり
・LANケーブルは8本線。RS485(2本)、電源(2本)使っているので4本余っている(JP3,JP2)
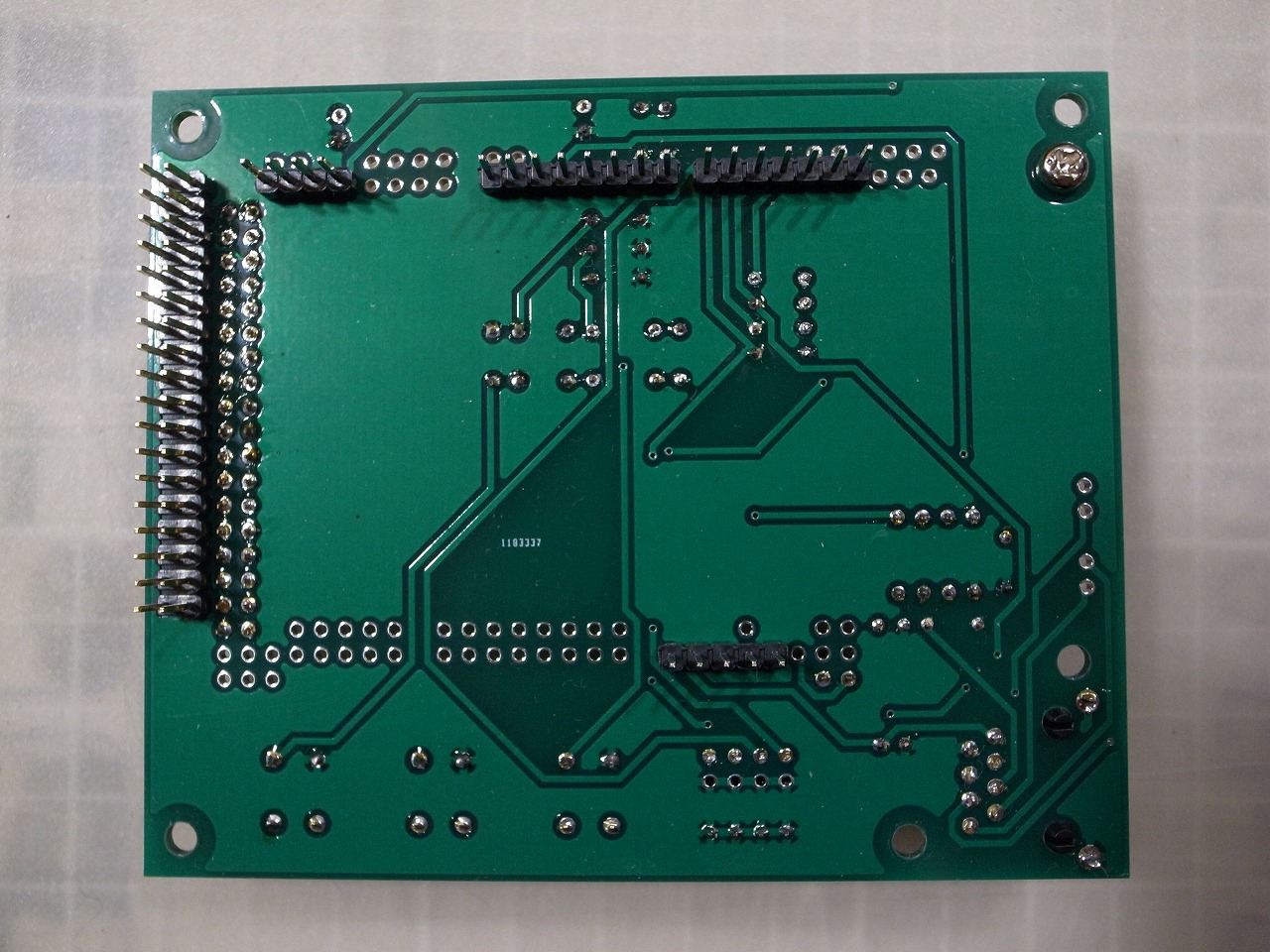
LCD shield adapter BOTTOM view
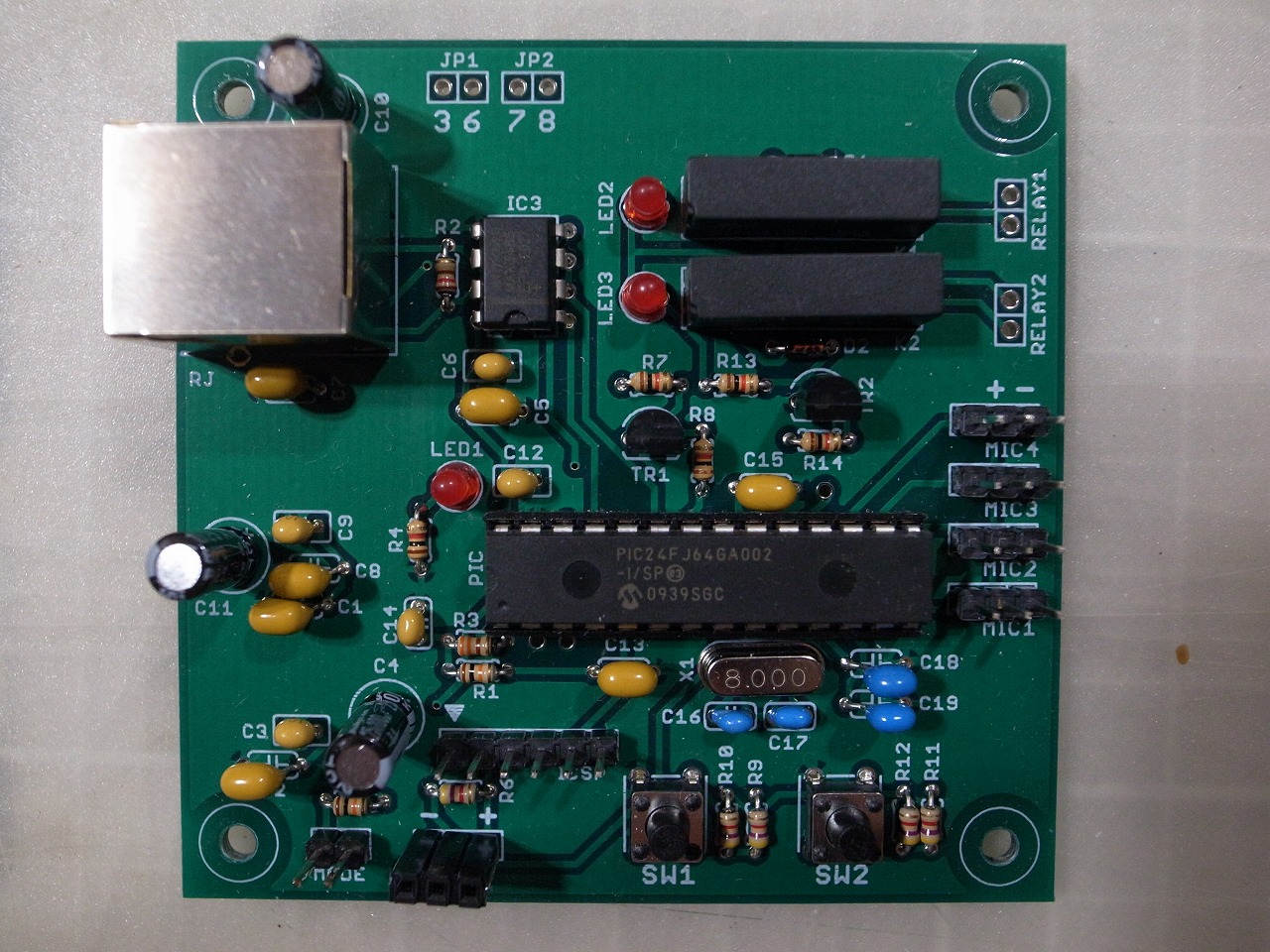
time lag counter TOP view
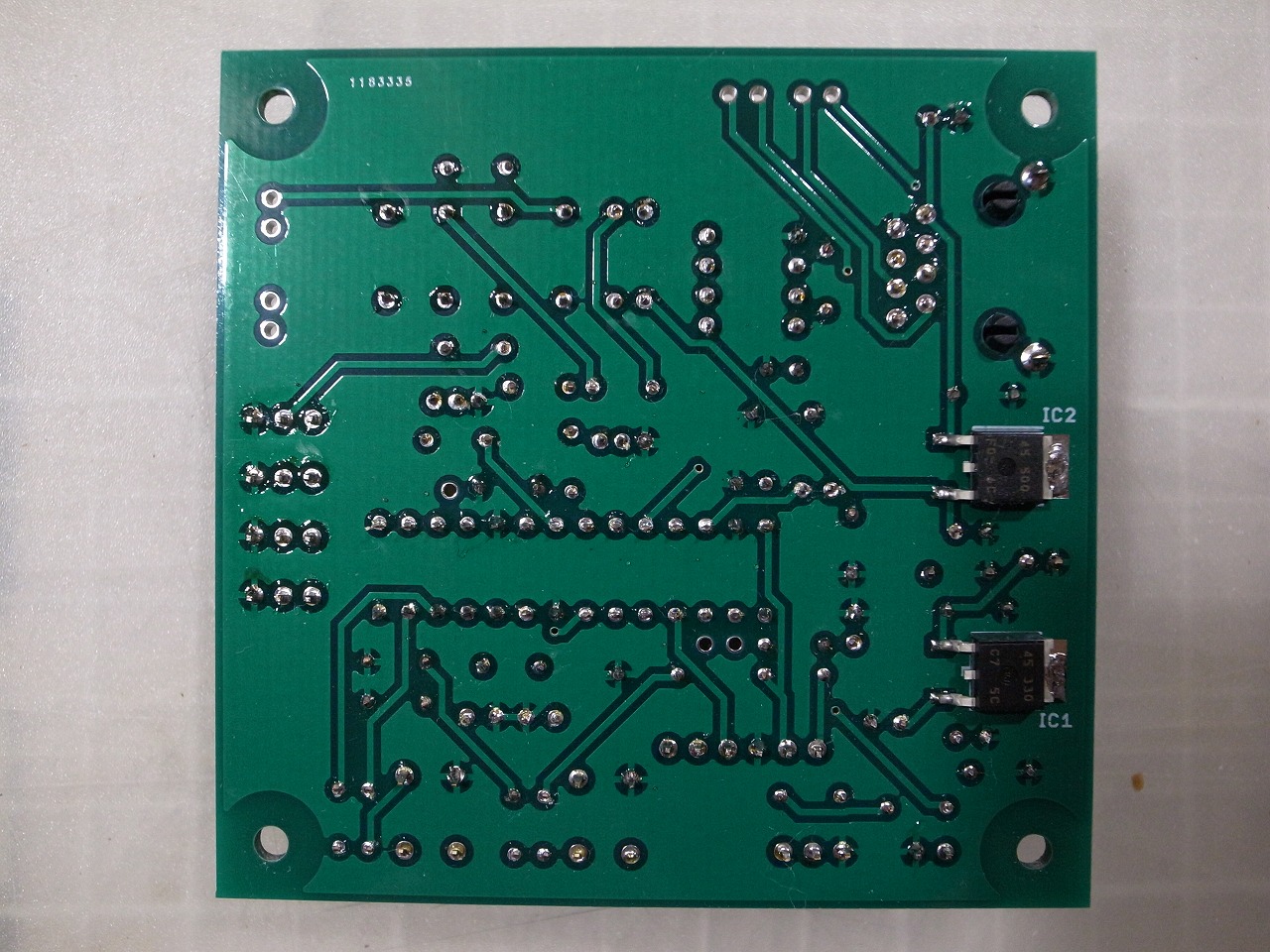
time lag counter BOTTOM view
temperature sensor

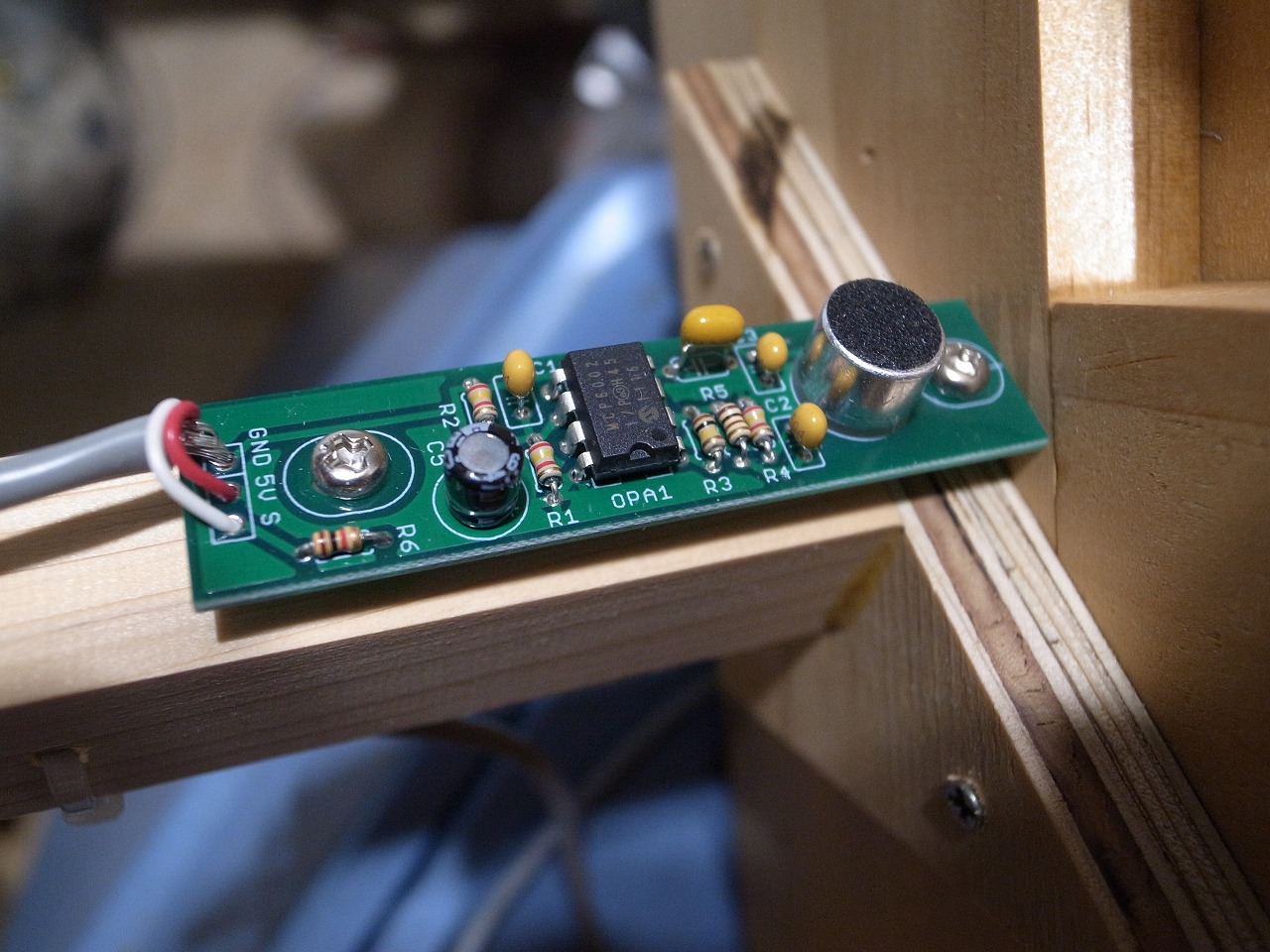
mic and amp
・マイクの底面は平面では無いので間にプラスチックワッシャーを挟んであります
BOM 部品表
・間違いがあるかもしれない 回路図を正として下さい
・arduinoは64bit浮動小数点計算をしているのでDueが必要。Due以外は精度不足で正しく計算できない
・リンクが切れるかもしれないが購入先の販売店リンクを張っておく
LCD shield
arduino Due R3
MIC

0001 //-------------------------------------------------- Ver1.0.0 ------ 2021-01-07 --------------
0002 // Acoustic Target Systems
0003 //----------------------------------------- written by Hiroyuki Iizuka ---- Japan ------------
0004
0005 #define DEBUG
0006
0007 #include <TFT_HX8357_Due.h> // Hardware-specific library
0008 TFT_HX8357_Due tft = TFT_HX8357_Due(); // Invoke custom library
0009 #define TFT_GREY 0x5AEB
0010
0011 #define TIMER_FREQENCY 16000000 // PIC24FJ64G002 32MHz fosc/2
0012
0013 #define COMMAND_QUERY_TEMPERATURE '1'
0014 #define COMMAND_LED1_ON '2'
0015 #define COMMAND_LED1_OFF '3'
0016 #define COMMAND_RELAY1_ON '4'
0017 #define COMMAND_RELAY1_OFF '5'
0018 #define COMMAND_RELAY2_ON '6'
0019 #define COMMAND_RELAY2_OFF '7'
0020
0021 #define pow2(a) ((a)*(a))
0022
0023 #define RS485_CONTROL_PIN 2
0024 #define PUSH_SW1 3
0025 #define PUSH_SW2 4
0026 #define PUSH_SW3 5
0027 #define LED1 6
0028 #define LED2 7
0029 #define DIP_SW1 8
0030 #define DIP_SW2 9
0031 #define DIP_SW3 10
0032 #define DIP_SW4 11
0033
0034 #define SW_ON LOW
0035 #define SW_OFF HIGH
0036 #define LED_ON HIGH
0037 #define LED_OFF LOW
0038
0039 struct mic_coord {
0040 double x;
0041 double y;
0042 double r;
0043 };
0044
0045 struct point_of_impact {
0046 double x;
0047 double y;
0048 };
0049
0050 //--------- USER EDIT BEGIN --------------------------------------------------
0051 #define NUMBER_OF_MIC 4 // 3 or 4
0052
0053 #define CALIBER 6.0 // mm
0054 #define TARGET_DIAMETER_10POINT 11.5 // mm
0055 #define TARGET_DIAMETER_STEP 16.0 // mm
0056 #define TARGET_AREA_BLACK 7 // point
0057 #define TARGET_DOT_SIZE 0.25 // 1dot = 0.25mm
0058
0059 mic_coord mic[] = {
0060 { -0.71, -0.71 }, // mic No1 X coordinate, mic No1 Y coordinate
0061 { 336.71, -0.71 }, // mic No2 X coordinate, mic No2 Y coordinate
0062 { -0.71, 332.71 }, // mic No3 X coordinate, mic No3 Y coordinate
0063 { 336.71, 332.71 } // mic No4 X coordinate, mic No4 Y coordinate
0064 };
0065
0066 #define TARGET_Z 11.0 // mm
0067 #define TARGET_CENTER_X 168.0 // mm
0068 #define TARGET_CENTER_Y 166.0 // mm
0069 #define TARGET_WIDTH 260.0 // mm
0070 #define TARGET_HIGHT 160.0 // mm
0071 //--------- USER EDIT END ----------------------------------------------------
0072
0073 boolean Mic_error;
0074 unsigned int timer_count[NUMBER_OF_MIC];
0075 String serial_buf;
0001 // USER DEFINED SETTINGS V5
0002 // This library supports the Mega and HX8357B/C display drivers only
0003 //
0004 // Set fonts to be loaded and speed up options below
0005
0006
0007 // ##################################################################################
0008 //
0009 // Define ONE driver, either HX8357B, HX8357C or ILI9481
0010 //
0011 // ##################################################################################
0012
0013 //#define HX8357B
0014 #define HX8357C
0015 //#define ILI9481
0016 //#define ILI9481_8BIT
0017
0018 // ##################################################################################
0019 //
0020 // Define the display width and height in pixels in portrait orientation
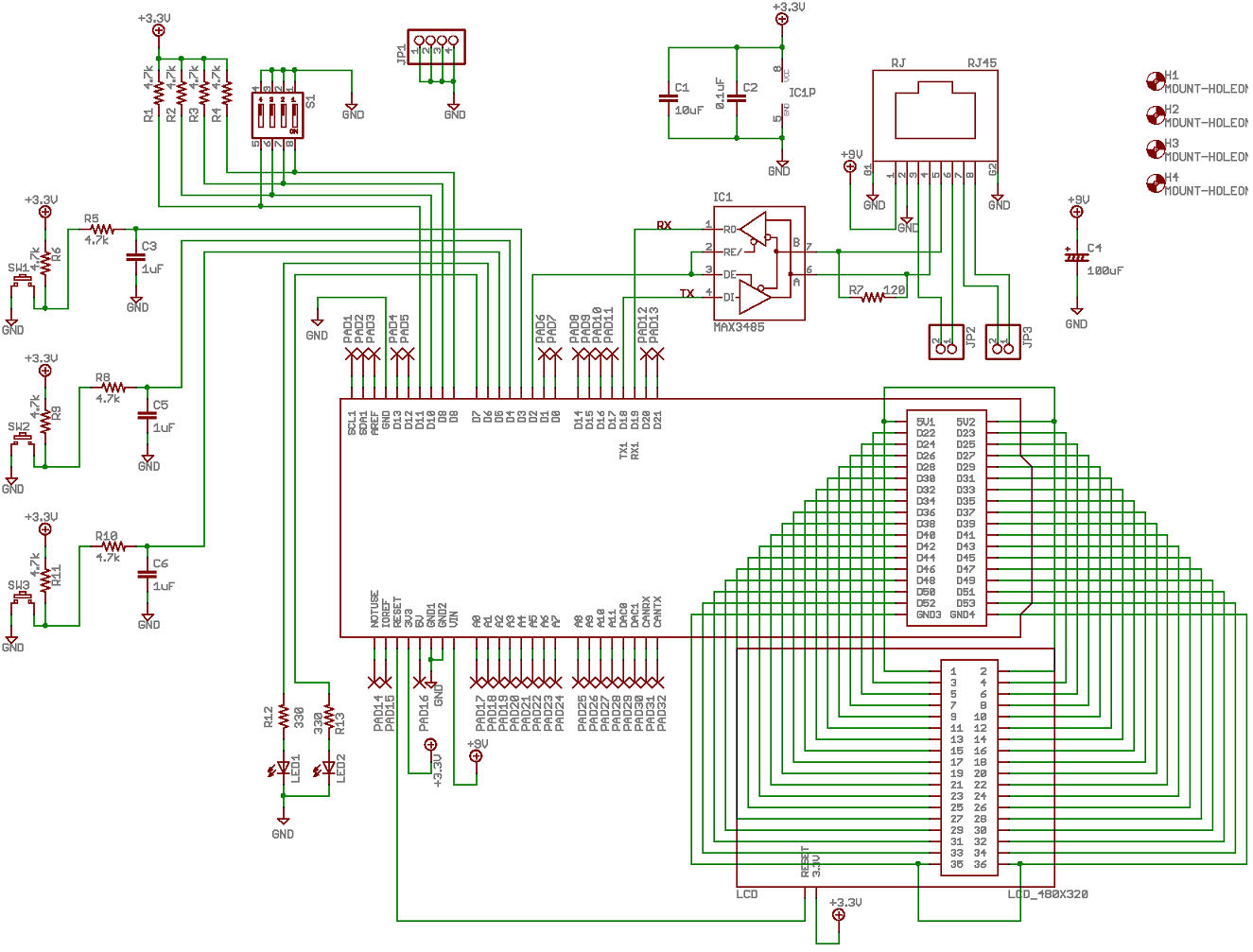
shield schematic
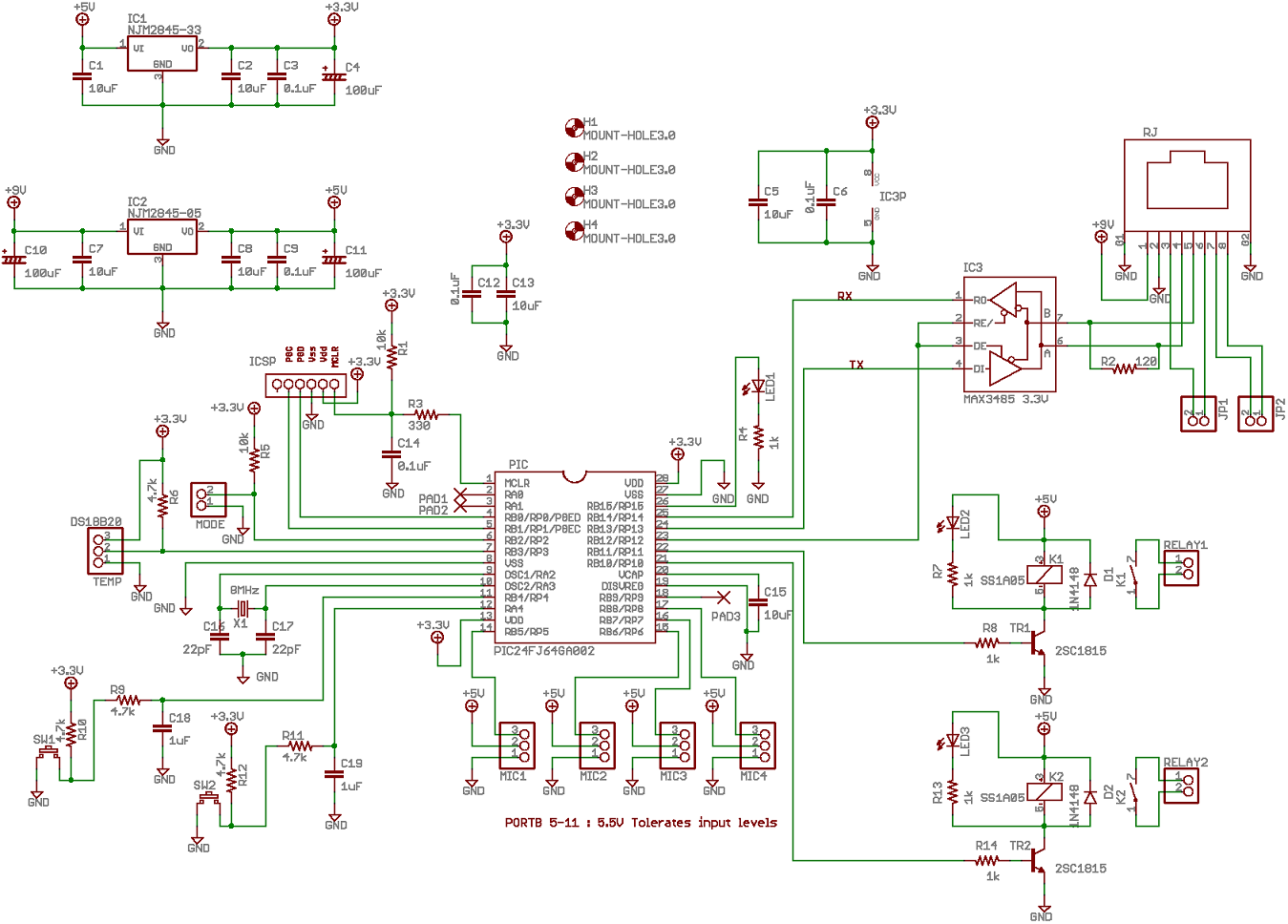
time lag counter schematic
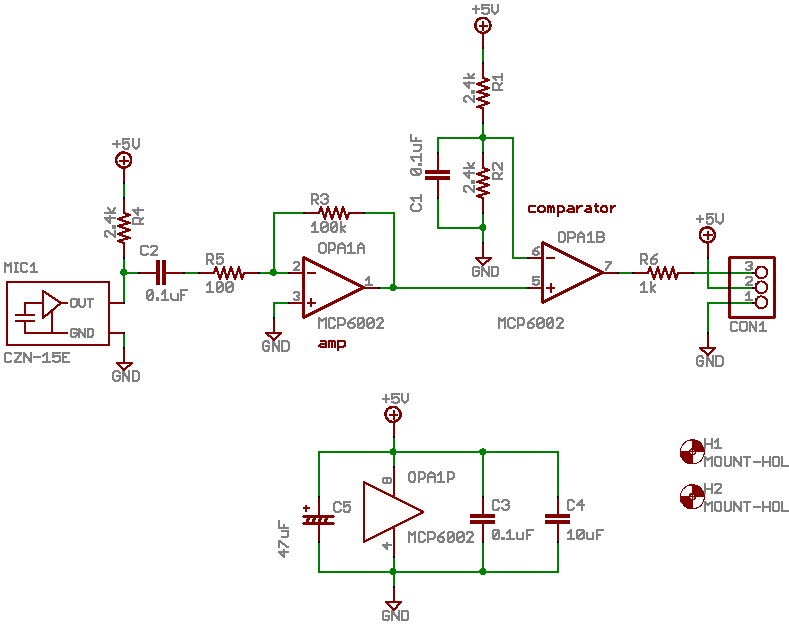
mic and amp schematic
・マイクの感度は固定です。増幅率を下げたいときはR5を大きくするか、R3を小さくしてください。増幅率はR3/R5になります
| program and schematics | ||
| ファイル | ファイルタイプ | 添付ファイルの解説 |
| electric_target_acoustic_ino.zip | arduino | arduino DUE sketch .ino file 480x320 LCD library |
| electric_target.X.zip | OTHER | MPLAB X IDE v3.55 xc16 PIC24FJ64GA002 firmware |
| electronictarget_shield_eagle.zip | EAGLE | LCD shield adapter eagle v4.15 brd + sch file |
| electronictarget_acoustic_rev1_eagle.zip | EAGLE | time lag counter eagle v4.15 brd + sch file |
| electronictarget_acoustic_amp_rev1_panel_eagle.zip | EAGLE | mic & amp eagle v4.15 brd + sch file |
| electronictarget_acoustic_amp_rev1_panel.zip | Gerber | mic & amp FusionPCB gerber file PCB size 96x65mm seeed studio FusionPCB ここにzipファイルごとgerberデータを貼り付けて注文する ビューアーでどんな基板が出来るか確認できる |
| electronictarget_acoustic_rev1.zip | Gerber | time lag counter FusionPCB gerber file PCB size 76x74mm |
| electronictarget_shield.zip | Gerber | LCD shield adapter FusionPCB gerber file PCB size 100x82mm |