2014-03-19
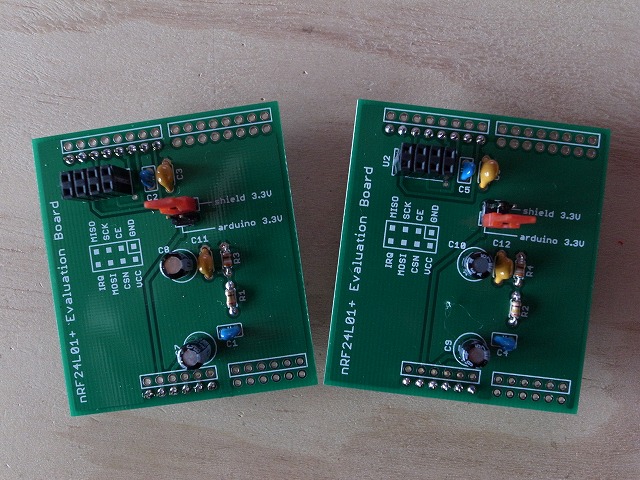
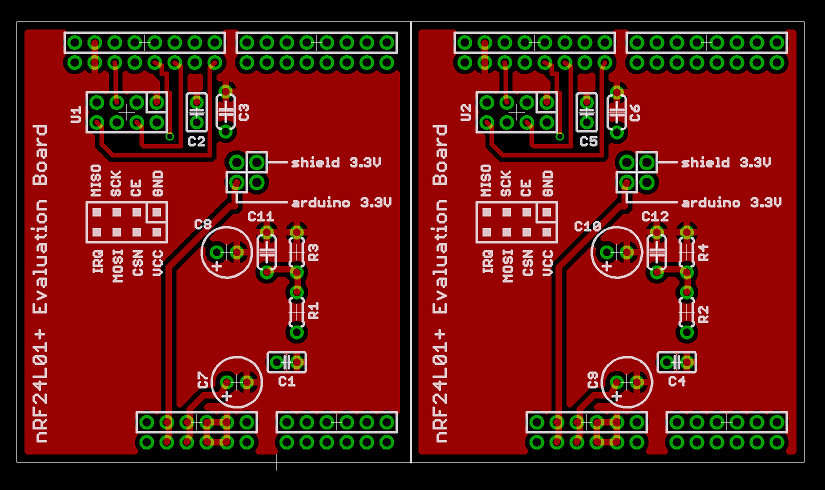
電源はシールド上の3.3Vを使用することもArduino標準の3.3Vを使用することも可能です
ジャンパーピンは
左:シールドの3.3Vを使用する場合
右:Arduinoの3.3Vを使用する場合
MirfライブラリーとRF24ライブラリーどちらでも動きます
=================================
RF24ライブラリー
=================================
・リファレンスはこれ
・多機能なライブラリー
・GettingStartedサンプルは変更無しで動く
-スケッチを書き込んでシリアルモニターを57600bpsで起動し送信側はtコマンド、受信側はrコマンドで送受信開始
-スケッチは送信側受信側両方とも同じ物を使う。コマンドで送受信が切り替わる方式
-受信側はtコマンドを入力した後にrコマンドを入力して受信モードにする。
こうしないとうまく動作しないことがある。これは通信モジュールの問題では無くサンプルスケッチの問題
-距離が10m以上の時は通信速度を250bpsに落とす
radio.begin(); の直後に radio.setDataRate(RF24_2MBPS); を追加する
通信速度はシリアルモニターに表示されるので変更されたか否か解る
・ダウンロードはここから。「Download ZIP」ボタンでダウンロード開始
=================================
Mirfライブラリー
=================================
・リファレンスとダウンロードはここから
・シンプルなライブラリー
・通信速度を250bpsに変更出来ないので遠距離通信は不可
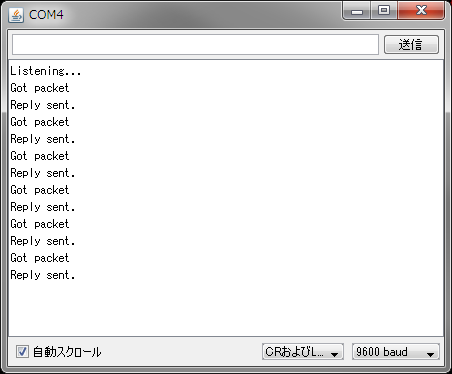
上記サンプルプログラムの実行結果。サーバー側のシリアルモニター画面。サーバー側が正常ならクライアントの画面を確認する必要は無い。通信しているので両方正常、両方異常のどちらにしかならない
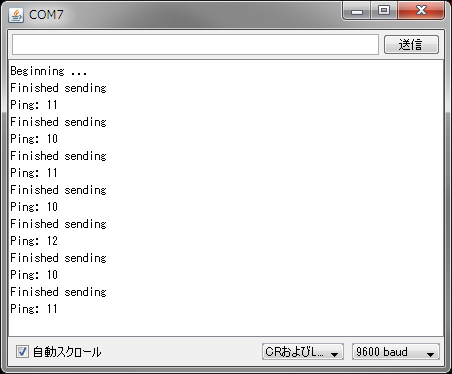
上記サンプルプログラムの実行結果。クライアント側のシリアルモニター画面
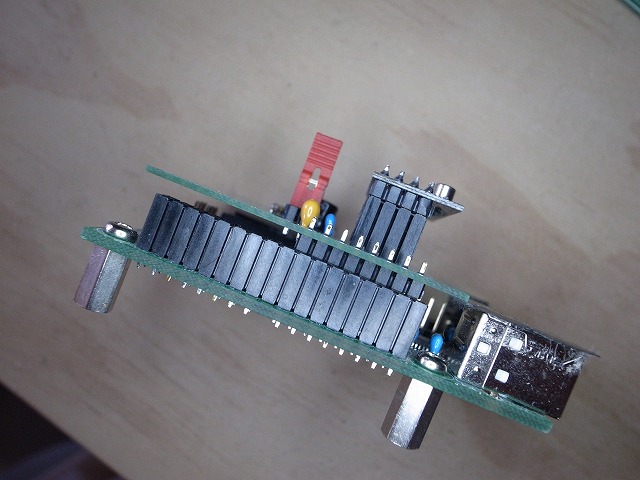
基板は薄いのでカッターで切断できます。裏表からやや強めに30回程度切れ目を入れて折って下さい。軽く曲げるだけで折れないようであれば切り込みが浅すぎます

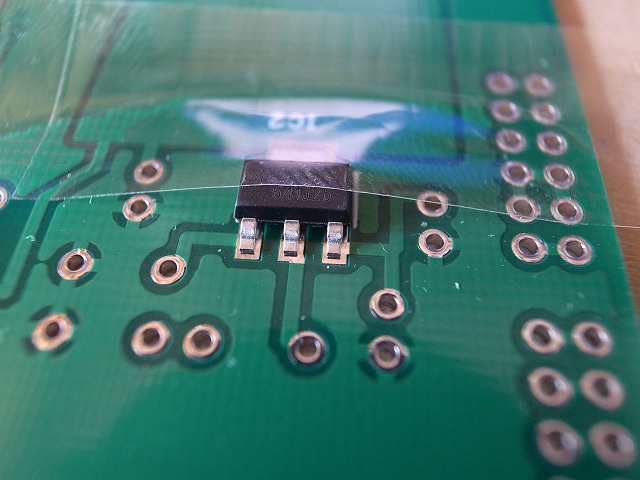
電源ICはセロハンテープで仮止めして半田付けします。大きい部品なので半田付けは容易です
段重ねする場合のためにパターンはありますが D0~D7,A0~A5 は使用しません
基板レイアウト
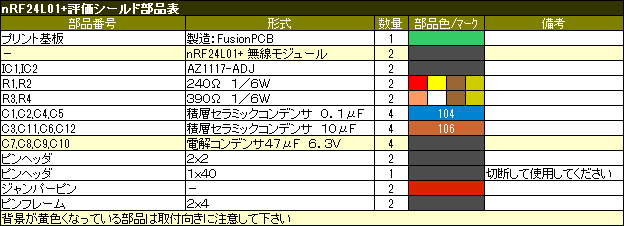
部品表
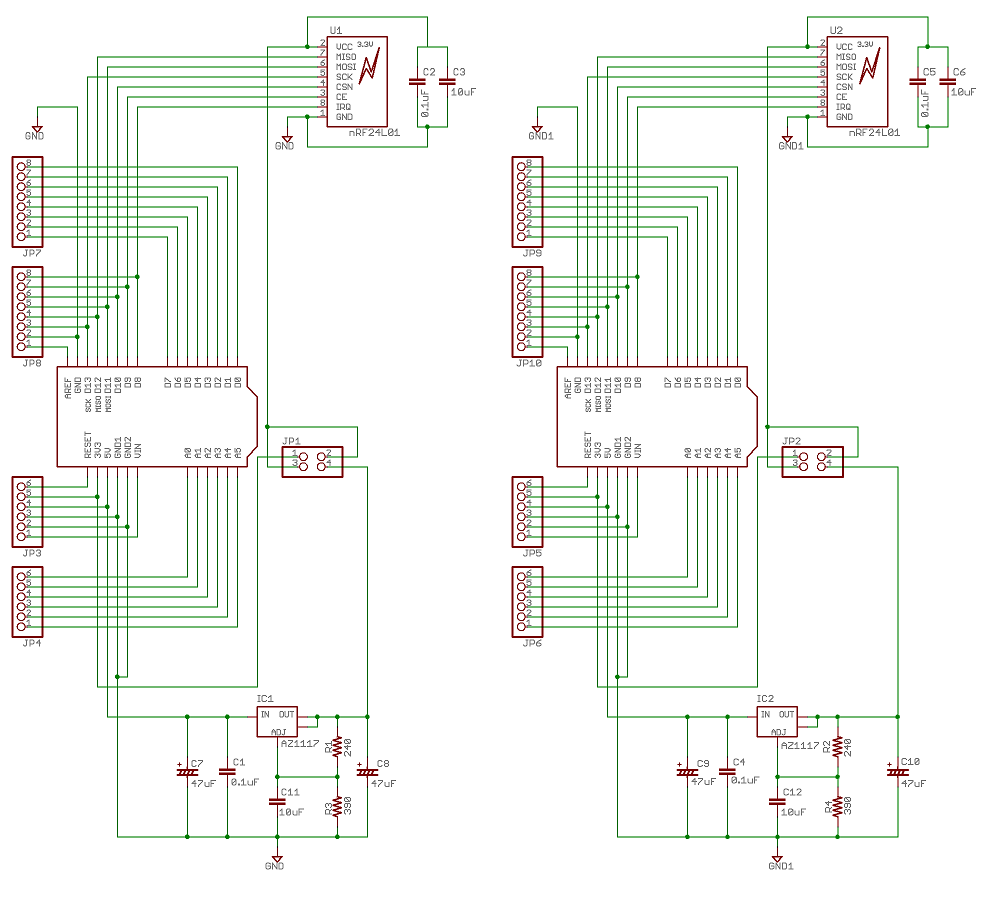
回路図