2013-01-14
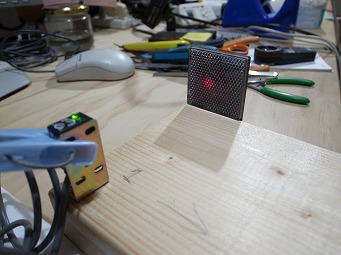
センサーはこれ。回帰反射方式の方が設置に神経質な感じ。光が2倍の距離飛ぶのとLEDが1個で有るのが原因だと思う。別体方式の物はLEDが2つ入っていると思う。距離は反射式が3m、別体式は10m以上ある感じ。実際は屋外で実験しないと解らない。

反射式。赤外線LEDと赤外線センサーが一体になっている。LEDの光が回帰反射板に当たって返ってきたところをセンサーでとらえる

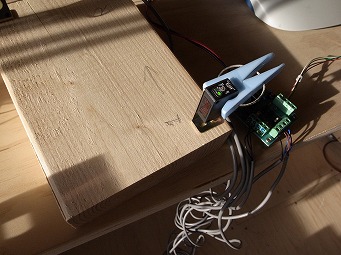
LEDとセンサーが別になっている物
2013-01-15
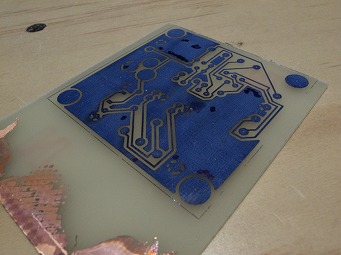
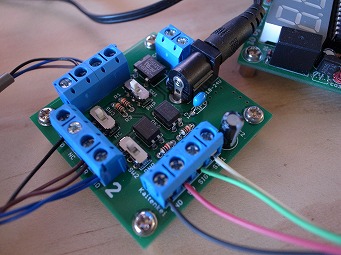
デジタル回転計用のアダプター。Press-n-Peelでエッチングが終わったところ。ラミネーターを使ってから失敗知らず。
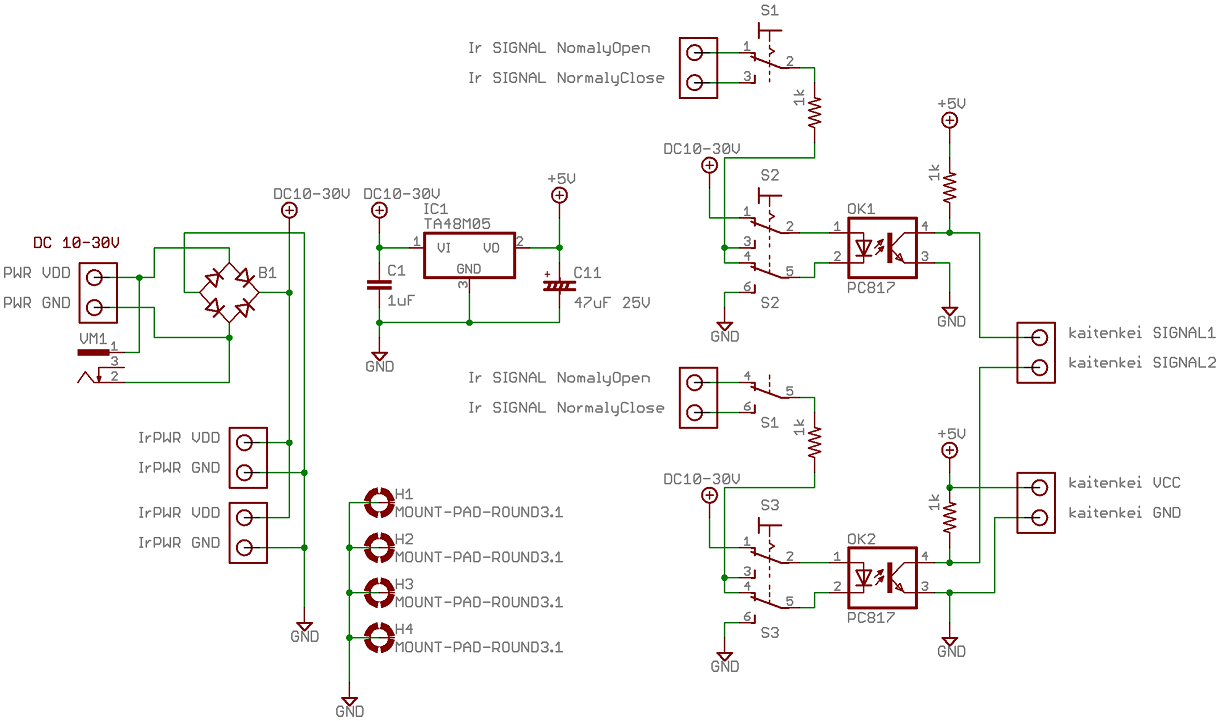
回路が複雑なのは
・センサーの電圧が5Vでは無い。DC10~30V
・出力はオープンコレクタだがNPNトランジスターになっている物とPNPトランジスターになっている物がありどちらにも対応できるようにしたい
・5Vの電源回路も含めた
という理由
2013-01-16
回路が間違っていたので作り直し

回路図
こんな感じに完成

2013-01-18
ソフトは大体できた。フライング判定等の機能も盛り込んである。ムカデレースに対応させるかは考え中。最後尾がゴールしたのを判定するのは面倒。
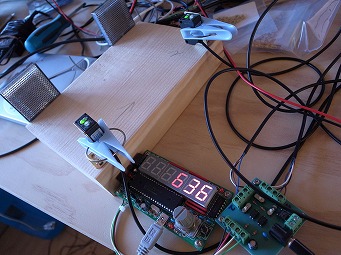
この中国製安物センサーは反応速度が遅くてダメ。反応が遅れるだけならスタートとゴールで相殺されて時間計測誤差は出ないが、高速で動いている物に反応してくれない。時速40kmで動いている物なら約200mmの大きさの物体で無いと反応しない。自転車のタイヤでは細すぎる。オプテックス製を注文しておいた。

2013-01-22
オプテックス製が届いたので実験。Z2T-2000NとZ2R-400N。両方とも約¥6000

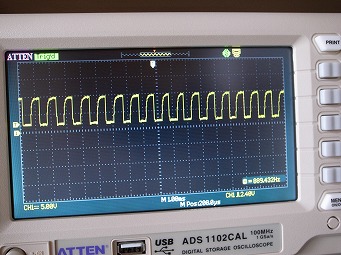
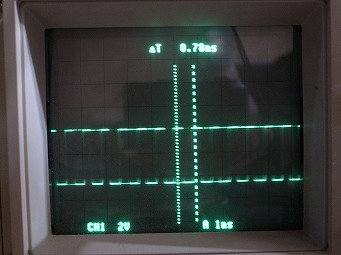
スリット付き円盤で反応速度を確認。このあたりが限界。カーソル間0.78ms。中国製とは次元の違う優秀さ。計測に十分使える。後は直射日光環境でどうなるか。
可視光なので何処にスポットが当たっているか至近距離だと良くわかる。部屋を暗くすると長距離の確認も容易。
2013-01-24
太陽を背にして回帰反射板が太陽光を反射する位置に設定したり

センサーが直接太陽を向くようにしてみたが問題なく動作する。そもそもそのような位置関係で使われることは無いだろうし、太陽が常に動いているのでセンサーを正確に太陽に向けること自体がかなり難しい。水平に配置する限り太陽は気にしなくて良いようだ。
左が中国製。この回帰反射板もオプテックス製の方が遙かに性能が良い。

2013-02-03
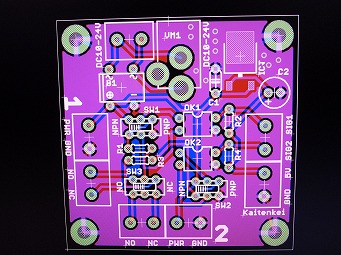
基板のレイアウトを修正。電源を逆接しても良いようにブリッジを入れた
2013-03-11
基板が出来たので組み立て。試作機と回路は全く同じ。フォトカプラは絶縁では無く電圧変換のためだけに使っている。LEDとフォトトランジスタのGNDが繋がっているので絶縁されていない。
2013-03-20
センサーのケーブルをうんと長くして波形を観測。このケーブルは確か300m。但しかなり細いので静電容量も小さい。

ケーブル通過後の波形。立ち上がりだけが丸くなるが応答時間1msを十分満足する。FA用なので長く伸ばせないほうがむしろおかしいか。