2005-02-09
仕様:
・速度は12段階、ロータリスイッチで可変する
・逆転は必要ないので省略
ソフト次第でどうにでもなる。ハードウェアは逆転に対応できる
・周波数は出来るだけ高く、4kHz程度にしてみる
低い周波数だとモーターから発信音が出るらしい。6kHz以上が理想らしい。
・動作周波数は液晶ディスプレイに表示する
・入力は単相100V
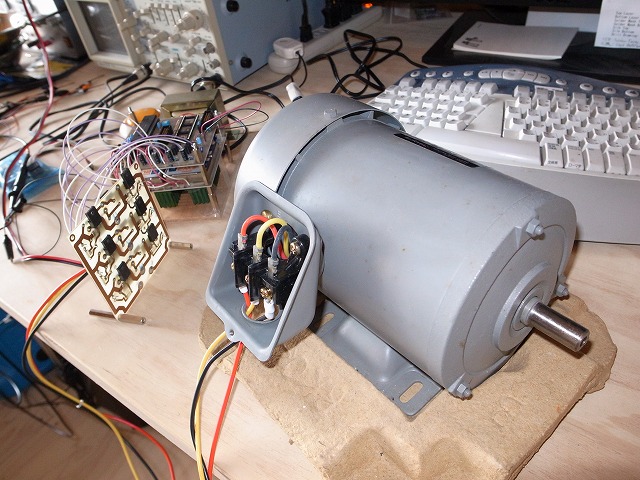
・駆動するモーターは 3相 200V 400W
今まで弱電回路意外は作ったことがありません。100V以上を扱う初めての回路です。回路を燃やすのを覚悟して制作に取りかかります。
回路図のPIC空きピンは何も接続していませんが、強いノイズを発生する機器では、4.7KΩ程度の抵抗を介してGNDもしくは5Vに接続しておく方がよいそうです。またピンの設定は入力設定にするのがメーカー推奨です。
ソフトで擬似的に周波数の異なる3相交流を生成させるのですが、汎用のマイコン(PIC)にはリアルタイムで波形を生成するだけの計算能力はありません。12種類の周波数の異なる波形データをあらかじめ生成しておくことにします。波形信号を出力するアセンブラープログラムをEXCELワークシートで自動生成できるようにしました。
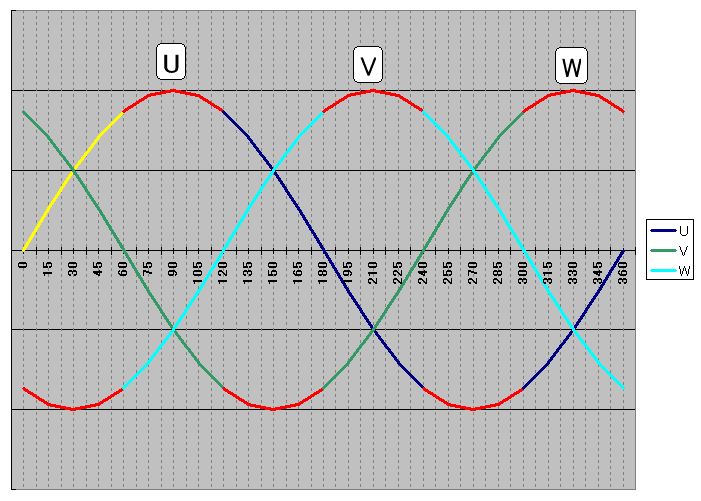
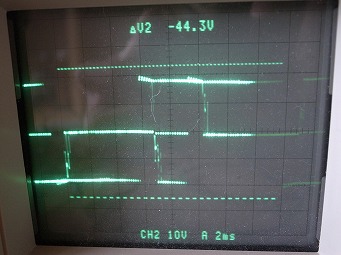
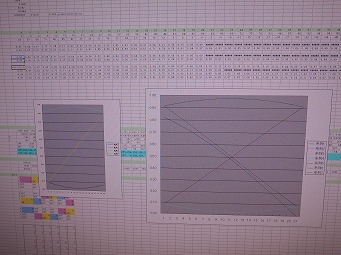
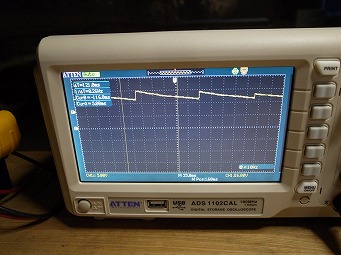
出力された波形はこんなです。
モーターはこれ。日立産機製。400W。端子BOXが出っ張っていて邪魔なので削り落としてしまう予定。これ一個でグラインダーが購入できる価格です。

図書館にインバーターの本がありました。著者の一人は三菱電機の人です。しおり代わりに使っているのは貸し出し券です。目黒の図書館なのでサンマの絵が描いてあります。インバーターのスイッチングによる騒音はスイッチング周波数の2倍の周波数になるそうです。市販のインバーターのスイッチング周波数は2kHz程度(ヒトの声の周波数がこのあたりだったと思う)らしいので、その倍の4kHzの騒音が出ることになります。スイッチング周波数を10~15kHzにすると、騒音の周波数が20kHz~30kHzになり人間の可聴域の限界に近づくので騒音が聞こえにくくなるそうです。
上の本に出力パワーアップの仕組みが掲載されていました。通常のsin波ではなく、sin波に振幅1/6で周波数が3倍のsin波を合成した波形で駆動するという物です。グラフにするとこんなです。青線が元のsin波、ピンク色の線が振幅1/6周波数3倍のsin波、黄色い線が両者を合成した波形です。この黄色い線でモーターを駆動します。このグラフは一相だけですがもちろん120度位相のずれた3相で駆動します。まだ先になりますがソフトをちょっといじるだけで対応できるので出力不足の時は試してみることにします。
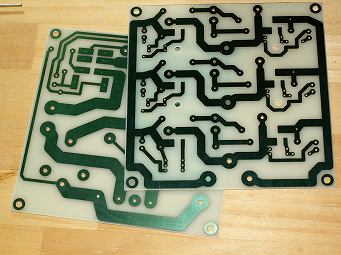
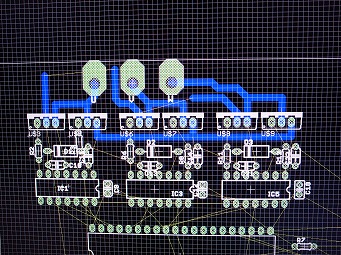
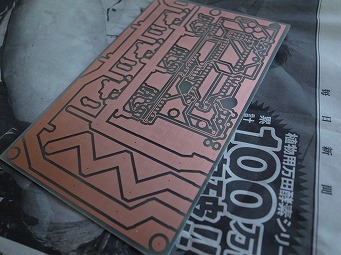
弱電回路を基板一枚に収めようとしましたがぎりぎり100×150mmに収まり切りません。断念して100×100mm基板2枚の2段重ねにすることにします。
パターンの上にのっているのはCPUとDC-DCコンバータです。
結果、基板は全部で4枚構成になります。
基板1.弱電電源基板
基板2.弱電CPU基板
基板3.強電整流基板
基板4.強電モーター駆動回路基板
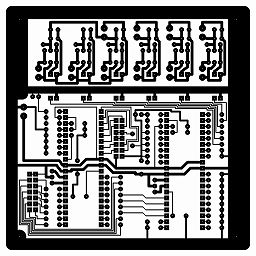
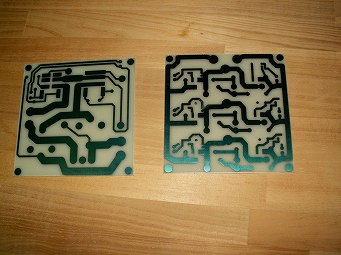
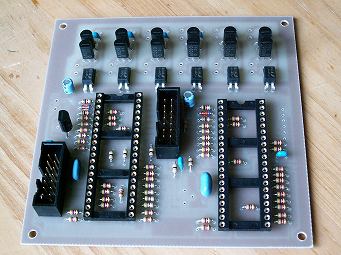
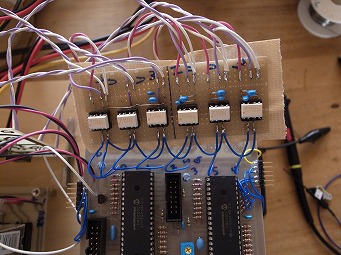
上の失敗作を2枚に分割したものが完成。「基板1.弱電電源基板」と「基板2.弱電CPU基板」です。
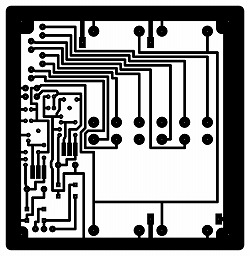
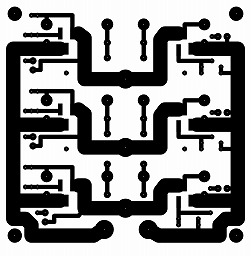
「基板3.強電整流基板」と「基板4.強電モーター駆動回路基板」も作りました。
整流基板に乗せるコンデンサーです。このクラスになるとプリント基板用コンデンサーは4本足になります。2本は固定のための足で何処にもつながっていません。インバーターを自作するとメーカー製より高くなってしまいます。メーカー製とほぼ同価格にするためには、このコンデンサーとDC-DCコンバーターを安く購入することが決め手になります。コンデンサーは最近アニメビルと化してしまった秋葉原駅前のラジオ会館内の若松通商で、DC-DCコンバーターは現品.comで購入しました。

2005-06-12
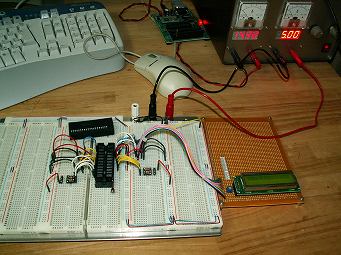
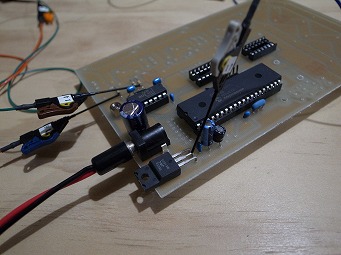
実験回路をブレッドボードの上に組み立ててソフトの開発に取りかかりました。とりあえず液晶表示部から作ります。液晶にはモーターの回転数を表示します。実際には出力周波数なのでモーターの回転数はそれより遅くなります。
2005-07-03
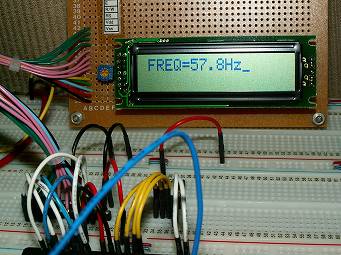
ディスプレイ部分のソフトはほぼ完成です。出力周波数の範囲はとりあえず25Hz~100Hzにしてみます。12接点のロータリスイッチで可変するので1段階=7Hz程度になります。
2005-08-13
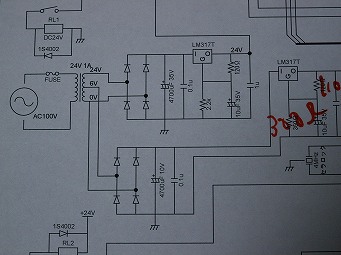
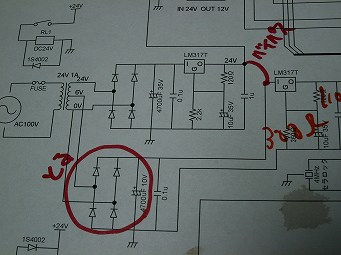
整流回路の部品のレイアウト確認。紙に印刷して並べてみないと部品同士が干渉してしまうことが多い。リレーは電源OFF時にコンデンサーにたまった電荷を放電させるためのもの、電源ON時はその逆のゆっくりコンデンサーに充電するためのスイッチとして機能します。高電圧用のリレーではないので壊れやすくなるかもしれないと思いソケットを使うことにした。これが結構高かった。リレーと大して変わらない値段。充放電に気を使う必要性は無い思うが基板のスペースがだいぶ空いていたので遊んでみました。

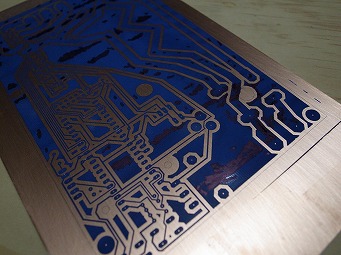
プリント基板の制作に取りかかりました。パターンを印刷したOHPフォイルは埃がつかないようにケースの中でインクが乾くのを待ちます

露光時間は感光用蛍光ライトにマジックで書き込んであります。露光時間は新品の基板で2分10秒、6ヶ月(有効期限ぎりぎりセーフ)たった基板で3分30秒とかなり違います。今回は有効期限切れだったので3分50秒にしてみました。結果、何とかきれいに出来上がりました。古くなった基板は現像時間も長く取る必要があります。新品なら30秒で十分ですが、今回は4~5分現像時間が必要でした。有効期限切れ3ヶ月は何とかいけそうです。6ヶ月すぎたらたぶんダメです。

エッチング完了したところです。今は湿度が高いので、この状態のままにしておいて昼間湿度が下がったときに感光剤を落としてフラックスを吹きかけます。基板の買い置きはもう無いので残り2枚は千石電商に発注。基板が届くまでNC翼形スチロールカッターのモーターを回す実験に着手します。
穴あけをしてからフラックスを吹くことにした。手順が逆だとキリコ(ガラスエポキシの粉)がフラックスを塗った基板に付着して取れなくなる。わかっているのだがいつも逆の手順で作ってしまう。強電回路は部品のリード線の太さがまちまちなのでドリルの交換が面倒です。
2005-08-30
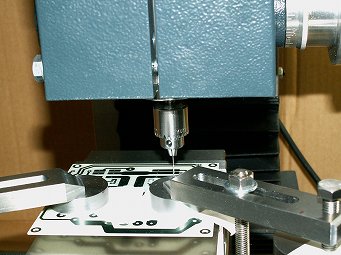
長穴開け忘れてました。1mmのエンドミルは高いので1本しか持っていません。折ると発注しないと行けないので0.6mmのドリルで1mm間隔に5個穴を開けてそれをエンドミルでつなぐ安全策をとりました。0.6mmのドリルを銜えているチャックは親指の先くらいしかないミニサイズです。横着してバイスの上に基板を固定しています
部品がのりました。...が抵抗を買い忘れてそれがまだのっていません。これを入れるケースなど必要な物をリストアップしてから、一緒に抵抗を購入するので通電はしばらくお預け。280V未知の世界。とても楽しみ。でも定格オーバーのリレー大丈夫だろうか。

2005-09-04
CPU基板も部品がだいたいのりました。部品の買い忘れがまだありました。いくつか穴がふさがっていません。基板の上の方の穴は電源とモータ駆動回路へつながる電線の穴です。
通電してみましたが何かチリチリ鳴ってます。電位差が異なる回路を共通GNDで繋いでいるインチキ設計が原因です。
いらない部品をはずして回路を修正。
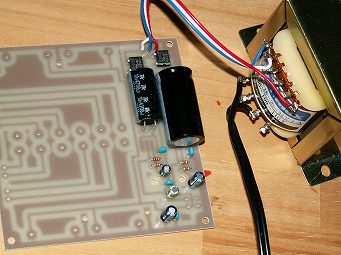
電源基板完成。このDC-DCコンバーターは24V入力で±12Vの出力がありますが、+12Vだけしか使っていません。入力12V、出力12V当たりが設計上は適当なのですが、この電圧の物が安かったのでこれにしました。

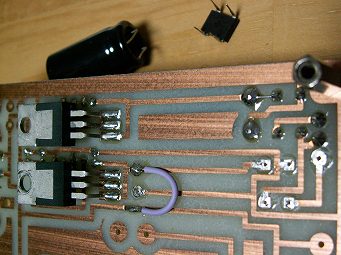
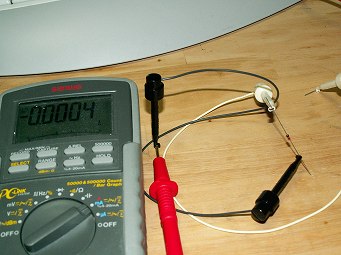
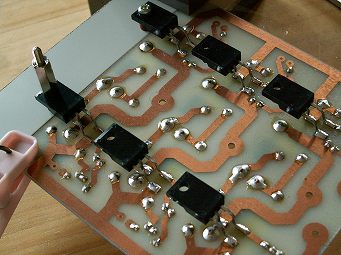
ツェナーダイオードは設計を始めた頃に購入した物で日がだいぶ経っています。見かけは小信号用の物とほとんど変わらないので本当にツェナーダイオードなのか不安になって確認しました。逆電圧をかけて18V付近で電流が流れ始めたらツェナーダイオードに間違い無しです。写真の状態では5Vしかかけていないのでほとんど電流は流れていません。右の写真はモーター基板作成中。黒く大きいダイオードは基板の裏に張り付いているFET保護用です。理想的なダイオードは一方にしか電流を流さないのですが、電流が流れている状態から急に極性を切り替えるとほんのわずかな時間逆方向にも電流が流れます。この逆方向にも電流が流れる時間が短いダイオードです。見た目は大電流用のシリコンダイオードのようにしか見えませんが1個¥120で約3割高。

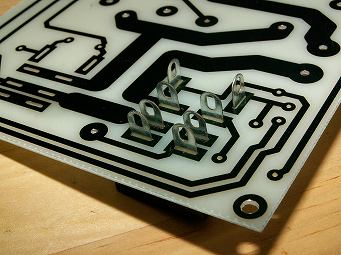
基板の裏に並んだ6個のFETです。これでモーターに流す電流をON,OFFします。一番上の2個は基板からはみ出しているためアルミ版で基板を延長してFETの位置決めをしています。
2005-09-21
まだ動いてもいないのにケースを買ってしまいました。幅120mm×高さ140mm×奥行220mmとかなり大きめです。もう一回り小さい方がいいのですが、これより小さい物は小さすぎて100×100mmの基板が収まり切りません。

ちょうどいいサイズだったかな。基板は3段重ねです。

2013-02-12
長期放置案件を再開。1号機は回路修正が多数入る可能性があるので性能を犠牲にしてソフトを早期完成させてしまうことにした。8年も放置されていたのでその間にMPUの性能も向上しているため処理速度が必要になったらdsPICなどに載せ替えてしまうことも出来る。当初有料だったPIC用開発ソフトも今は殆ど無料の時代。
処理を簡単にするためにロジックを見直す。3相の波形は60度分の波形の繰り返しになっている0~60度の波形を上下反転すると60度~120度の波形になる。SINカーブは0~60度分を生成しておけば良い。
0~60度までに着目するとU相の黄色い部分の波形電圧を反転した物がW相の波形になるし、U相+V相+W相=0が成り立っているので、2相が決まると他の1相も決まる。
さらに図の赤い部分ではスイッチングせずにONしたままにしておけば他の2相のスイッチング動作によって自動的にSIN波形が生成される。
2013-02-13
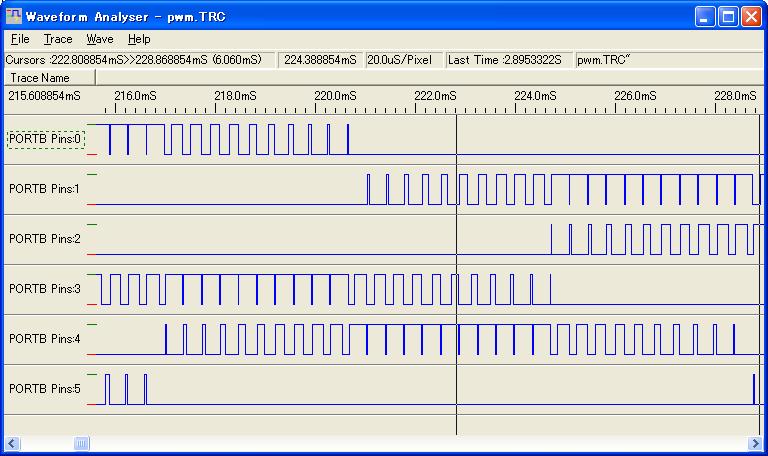
テストプログラムは回転数固定。167Hzあたりが処理速度上の限界。アセンブラを使っていないがそこそこ使える波形になっている。PWM周波数は6kHz。フォトカプラのターンオフの遅さが問題になりそう。
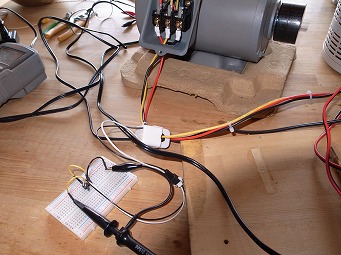
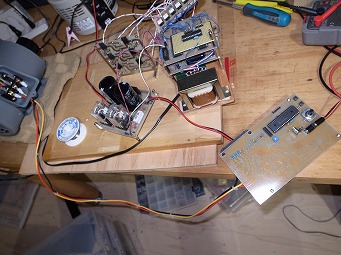
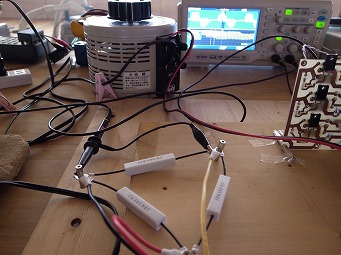
ブレッドボード上で開発。これを作り始めた頃より機材がそろっているので効率が良い
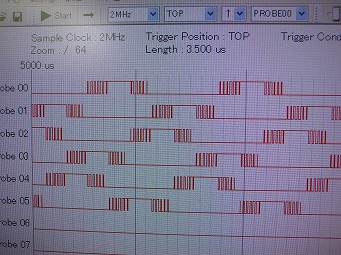
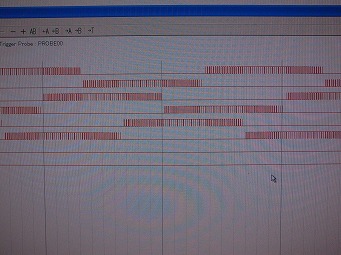
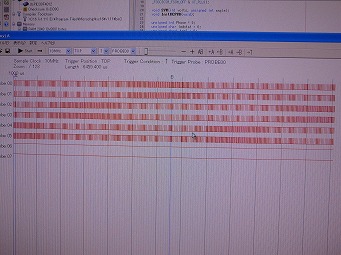
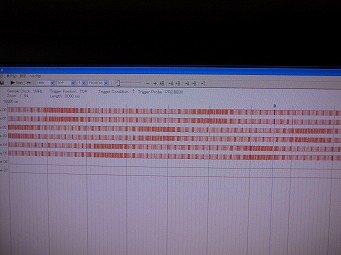
出力波形をロジックアナライザーで計測した物。sinカーブの頂点では無駄なスイッチングをしていない
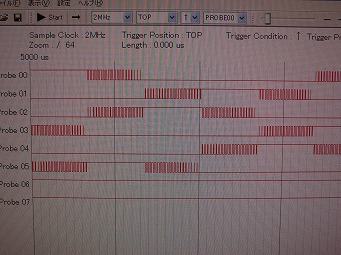
50Hzだとこんな感じ
2013-02-14
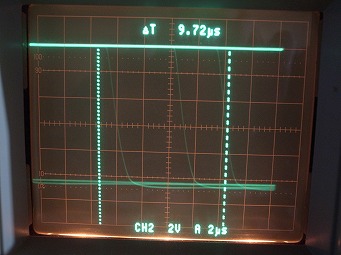
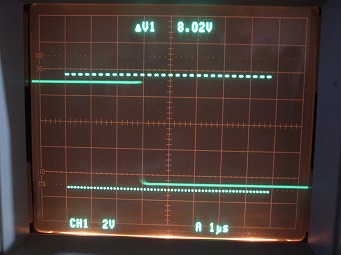
予想通りフォトカプラのターンオフが遅い。4μsecかかっている。フォトカプラは汎用品のPC817

こちらはターンON。やや速いが遅いことに変わりは無い。抵抗でプルアップしてある回路なので立ち下がりがターンONで立ち上がりがターンoff
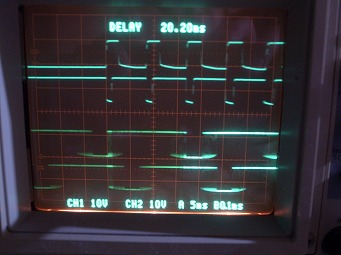
電源電圧が高いのでTLP250が使える。買い置きがあったので速度を確認してみた。ターンON/OFF共に高速。スイッチングが遅いとFETがゆっくりON/OFFするのでFETの発熱が多くなるはず。問題になるほど熱くなるようであればTLP250に載せ替えることにする。足の配列が異なるので単純置き換えは出来ない。
2013-02-15
FETのゲート電圧。波形が逆だった。この回路はMPUが動き出す前にモーターの電圧がかかるとFETがショートスルーしてしまう。100V側にリレーを付けて阻止しているが良い設計では無い。波形はソフトで逆転させた。
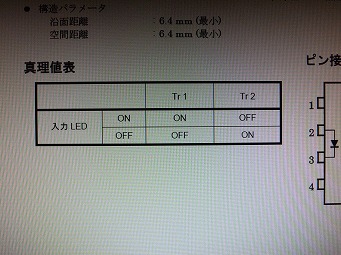
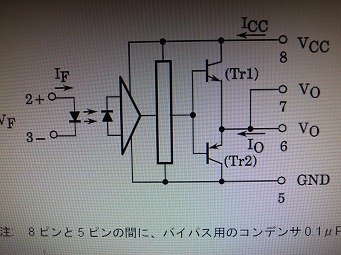
TLP250はモーター制御用途で使うことを考えてあるのでLEDが消灯しているときは出力もOFF。
いきなりAC100Vは危ないので実験用電源の20Vで操作確認。効率が悪いのかコーセルのDC-DCコンバーターがかなり暖かくなる。
モーターU-V相間の波形。何か違うような.....
2013-02-28
改造箇所多数。検証が終わったら2作目を作ることにする。長期放置したので入手できる部品も変わっている。
2013-03-01
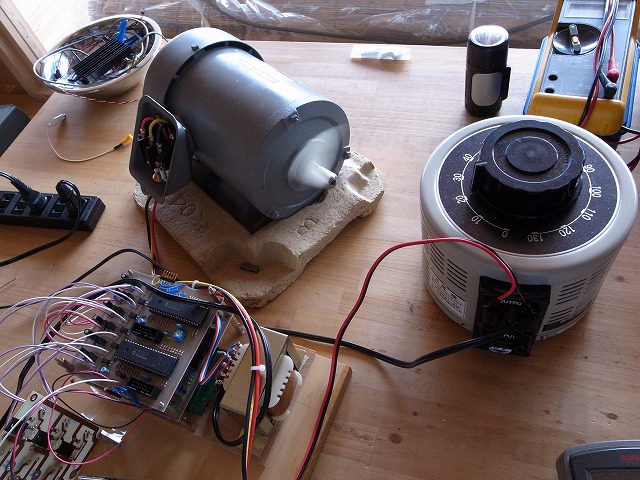
100Vで動かす。
・モーターから出る音が大きい
・ノイズがすごい。人体がアンテナになってPICのプラスチックパッケージ部分を触ると誤動作する。
・無負荷ではFET等熱くならず。消費電力は70W程度。
コンデンサで平滑しているので力率が悪くて実際はそれよりかなり低いはず
2013-03-03
ジュラコンの丸棒を取り付けた。軍手をしてつかめば負荷になる。200Wのボール盤とあまり変わらない感じ。100Vでいきなり回し始めると異常振動が出る。80Vから100Vに上げると問題は発生しない。ソフトスタートのような仕組みが必要か?

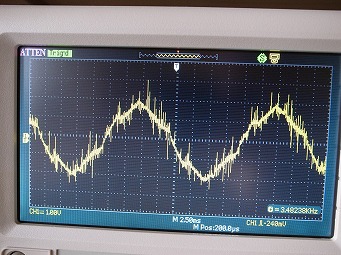
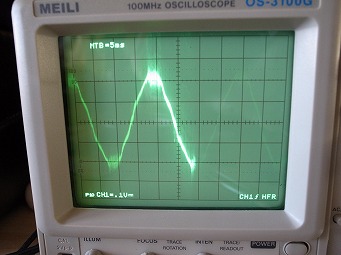
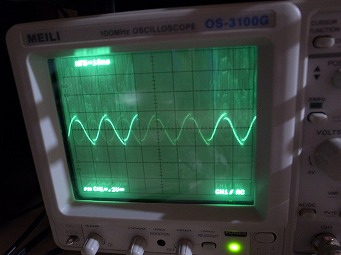
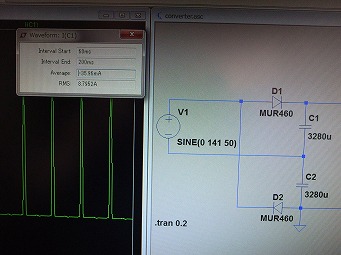
波形もきれいでは無い。モーターU-V相間の波形。おかしな形をしているような... 3相はGNDが無いので120度位相がずれたSINカーブの波形を計測器で観測することが出来ない。整流回路(コンバータ)の出力電圧は280Vだがオシロスコープでモーターの相間電圧を測ると倍の560Vになる。オシロスコープで計測出来るのはミノムシクリップをGNDと見なしたときの相対電圧なのでミノムシクリップの電圧がGND<->電源電圧に変わる回路では波形のPeak-to-Peakは倍になる。
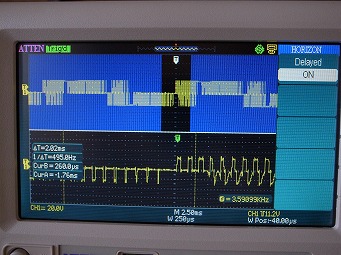
CTセンサーで電流を見るとこんな波形

2013-03-14
電源(DC-DCコンバータ)がハイサイド側に3つも必要になるのでブートストラップ回路の実験。利点も欠点もある。
ダメなところ
ハイサイドがスイッチングしているときはローサイドもスイッチングしている必要がある
その結果
1.ノイズが増える
2.ソフトの書き間違いでショートスルーが起こる可能性が高くなる
3.ソフトが複雑になる
4.DUTY100%には出来ない
良いところ
1.電源が3つ省略できる
2.専用ドライバーICが利用できるので回路がシンプルになる
専用のゲートドライバーを使うと回路がものすごくシンプルになる。これを使うとフォトカプラ<->FETのゲートの手前までの回路がこれ1個に置き換えられる。その反面いじれるのはソフトだけになる。価格を調べるとRSで¥900程度。これの1/3バージョンIR2110は秋月電子でも売っている
IR2130
2013-03-18
トルクが弱いのでTLP250に変更。
フォトカプラを変更
電流波形。ノイズが大きいのはCTセンサーのシャント抵抗が大きいため
殆ど効果無しなのでモーターの代わりに抵抗負荷にして波形を見てみた。抵抗両端の波形を観測するとうねる変な波形。スナバ回路の影響か??? 10Ωの抵抗が3本なかったので5Ωを2個直列にしているため全部で4本有る。抵抗はデルタ接続。電圧は10V程度に落としてある。
2013-03-19
うねる波形の原因はコンデンサの容量だった。コンバータを通った後の電源波形。プローブを逆に繋いだので正負反転している。画面中央がGND。理想型は直流。コンデンサの容量は価格優先で安売り品をえらんでいる。電源の50Hzとインバーター出力の50Hzの周波数のずれでうねっているように見えのでは無いかと思う。
2013-03-20
コンデンサに蓄えられるエネルギーは1/2*CV^2なので電圧は二乗で効いてくる。10Ω抵抗で電力不足になるのは電圧が低いからというのが結論。2200μFあれば400Wは十分吐き出せる計算になった。厳密に数式で解くのは難しいので瞬時値の電圧をEXCELで計算して1サイクル分積分。LTspiceで回路を書いてしまうともっと正確に出る。
AC100V側にクランプ電力計を取り付けて計測してみると過負荷時には400W以上、無負荷で100W。ONデューティーは80%にしてあるのでもっと出力は出るはず。とりあえず400Wはこんなもんだということにしておく。

2013-03-23
DUTYを95%に変更したが殆ど変化無し。
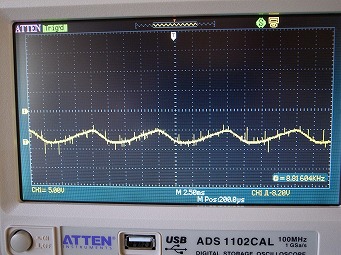
写真はCTセンサーで検知したモーターの電流波形。電圧が半分だとSIN波なのだが100Vにするとだいぶ歪む。
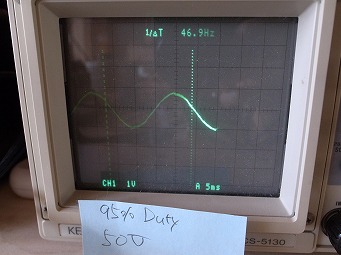
スライダック電圧50V
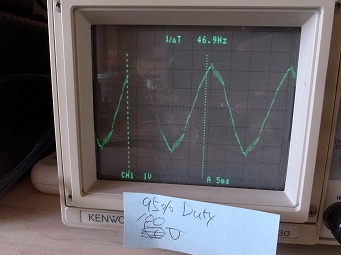
スライダック電圧100V
2013-03-26
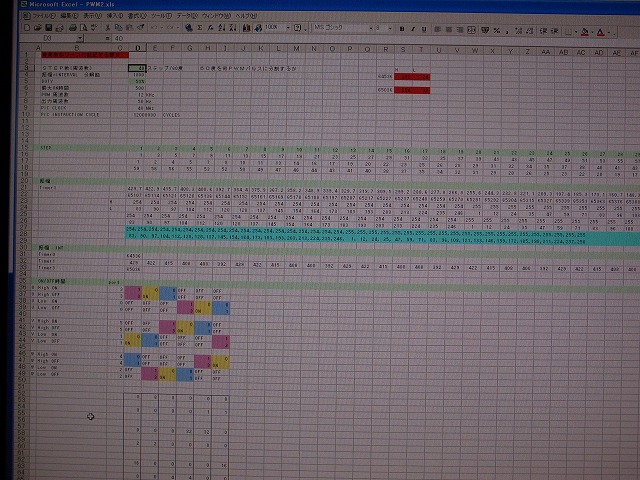
SIN波形はこんなEXCELワークシートで生成している。
回転数を半分に落とすとモーターから出る音が異常に大きくなる。スライダックの電圧50V以上は危険な音量になる。V/F一定なのでデューティーは50%に抑えてある。理論上は問題ないはずなのだが。原因不明。PWM周波数を2倍の12kHzに変更してみたが状況変わらず。
2013-04-04
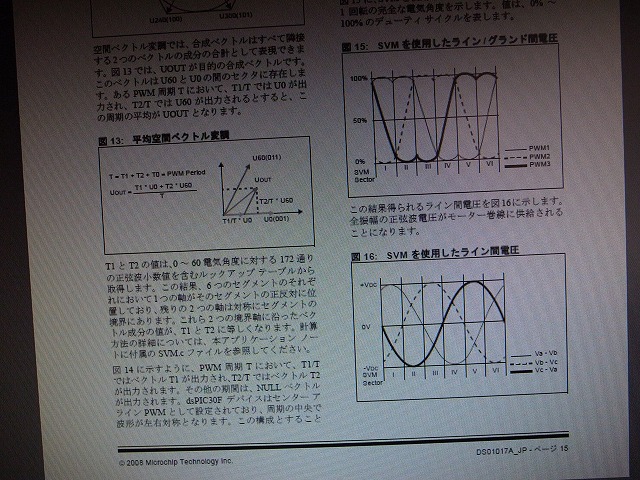
PWM波形の生成には空間ベクトル変調(SVM)とかいうのも有るらしい。Microchip社のアプリ-ケーションノートAN1017。永久磁石式の3相ブラシレスモーターの評価キットもある。これをひな形にして改造したらそこそこ使える物が出来てしまいそう。
現時点の疑問点
3相波形で電圧がゼロになる点はPWMスイッチングではどっちが正しい?
・電流が流れないのだからハイサイド/ローサイド共にOFFのハイインピーダンス状態
・中点なのだからハイサイド/ローサイド共に同じだけONするDUTY50%の状態
今のソフトは前者になっている。SVMのロジックは後者になるような気がする。違っているかな? <-違ってました
2013-04-07
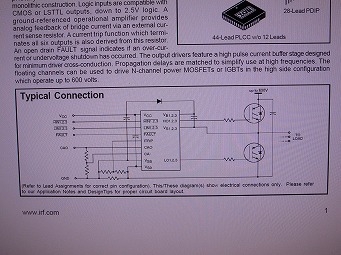
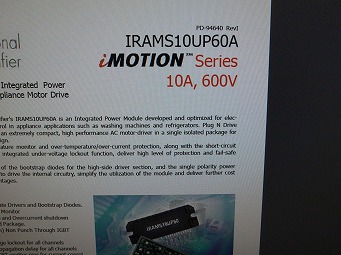
こんなのを読んでみた。最近ではIPMというのを使うらしい
IPMのデータシートを見るとMPUをつなげるだけでインバーターになる。インバーターの主要な構成部品は
・コンバーター
・IPM
・MPU
ということのようだ。この構成だとハードウェア上の考慮点は殆ど無くなるので純粋にソフト開発だけの世界になる。
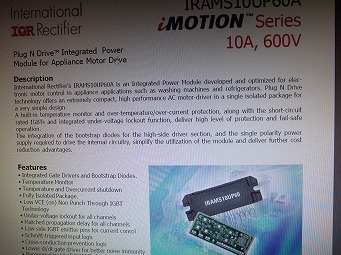
IRF社のもの
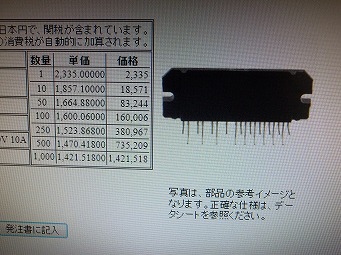
Digikeyで約¥2000
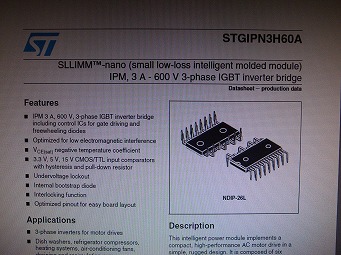
こんな形の物もある
SVMの波形をEXCELで書いてみた。×の部分は厳密には直線では無いがほぼ直線とみて良い。上下の凸凹部分はSINカーブの曲線成分だけを抜き出したような物。
2013-04-13
SIN波形の頂上でもスイッチングするようにしてみた。理論上何も変わらないはず。頂上のノイズが増えただけ
スイッチング波形
電流波形。シャント抵抗値は0.1Ω
2013-04-16
ソフトをいじろうとするとPIC18シリーズの48MHzでは速度不足になるのでdsPICを使うことにした。dsPICはPWM出力が3セット有るので3相モーターの制御が容易になる。
しばらく見ないうちにソフトがリニューアルされていた
IDEも新型になっている。今までのIDEは他社製ソフトに比べると大幅にお粗末だった
2013-04-17
dsPICの動作確認のためLED点滅プログラムを書いてみる。バージョンアップしたIDEはあまり進歩していなかった。dsPICはパスコンが無いとブレッドボードで安定動作せず。データシートを見るとかなり大食い。
2013-04-20
dsPICが動作不安定な原因はオーバークロックだった。10MHzの水晶の場合はPLLx8の80MHzが最大。これをPLLx16の160MHzで動かしていた。データシート上最速は7.5MHz PLLx16の120MHz。
ソフトはAN1017からPID制御を取り去った物。PWM周波数20kHz。発信周波数が全く聞こえない。トルクはあまり変わらない感じ。PIDが前提になっているロジックなのでもっとシンプルな物に書き換える予定。
dsPIC30F4012
PWM波形
2013-04-21
SVMの電流波形。ノイズがものすごいので安物デジタルオシロではこの波形観測不能。25Hzでも今度は変な音は出ない。トルクは小さくなるが問題なく使えるレベル。次は強電側をIPMかIGBTに変更してみる。
2013-04-24
IPMはこれを使うことにした。基板の上にIGBTやドライバーを実装して一つのパッケージにしたPentium2のような構造。IGBTと比べると放熱が格段にやりやすい。
回路はこんなにシンプルになる
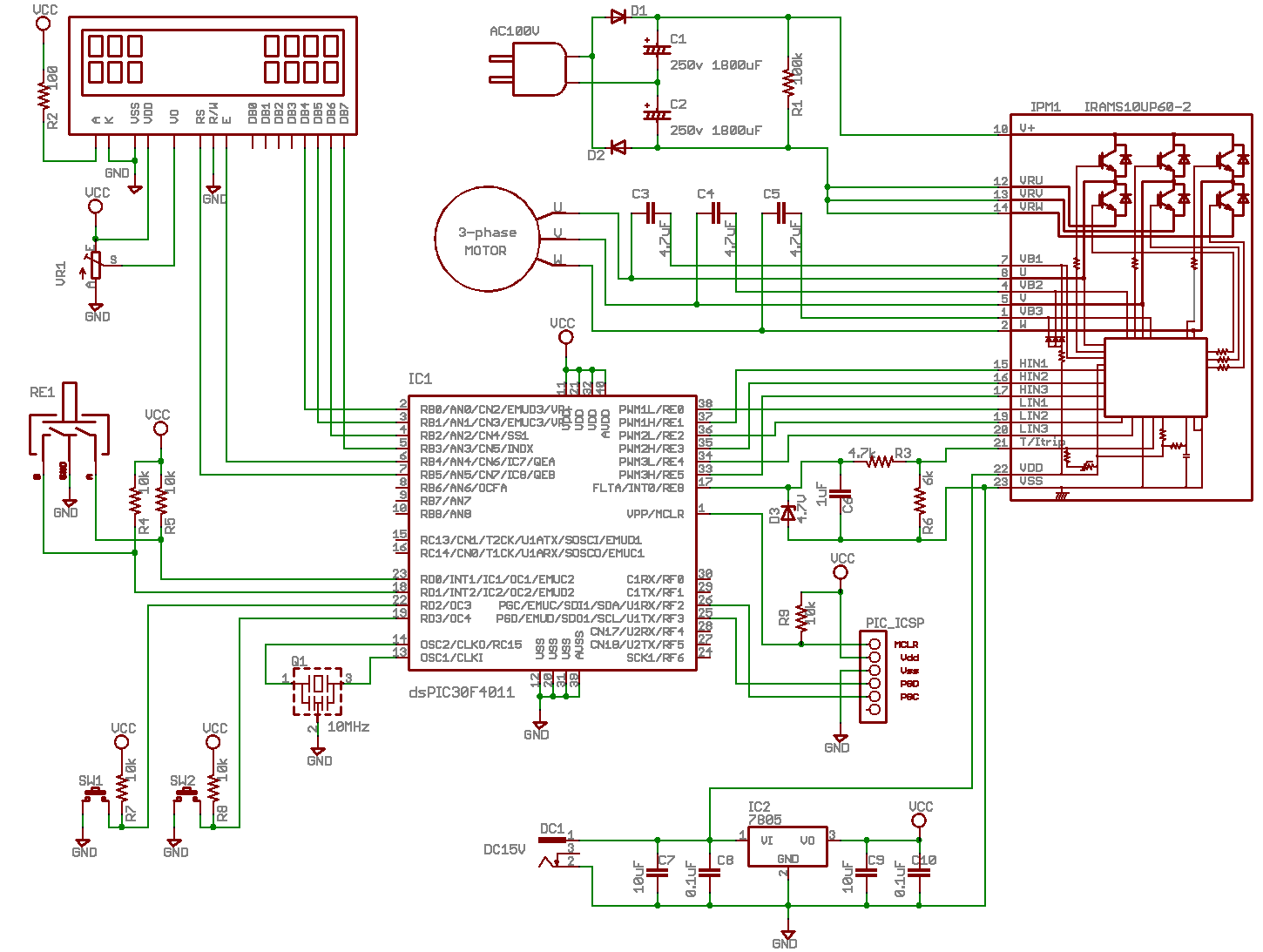{kind=link}
2013-04-25
1ボードインバーター。これから回路定数を決めていくがコンデンサは4個使わないとダメそうな感じ。コンデンサのデータシートには定格リプル電流というのがある。電流の実効値はそれより小さく抑える必要があるのだが2個だとそれを大きく上回ってしまう。おおざっぱな目安は100Wあたり1000μFのコンデンサを1個使う感じ。400Wのモーターを回すのなら1000μFのコンデンサを4個使って倍電圧整流回路を作る。データシートのtanδから発熱量も計算できるが定格リプル電流というのがそもそも寿命を満足する発熱量に抑えるための電流値のようだ。1000μFのコンデンサ2個の方が2000μFのコンデンサ1個より表面積が大きく放熱に優れるので流せる電流も大きくなる。
2013-04-26
大電流が流れる回路はダイオードの選択も面倒
・発熱を抑えるためにVfは小さい方が良い
・発熱が大きいので放熱しやすいパッケージの物が良い
・サージ電流やピーク電流の最大定格に余裕が無いといけない
・入手性、価格も適当で無いといけない
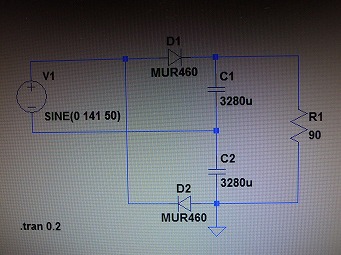
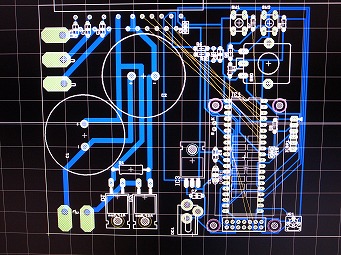
この回路でR1は大体750W消費する
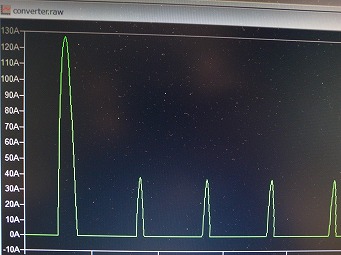
サージは130A 繰り返しピーク電流は約40A 平均電流は5A
2013-04-28
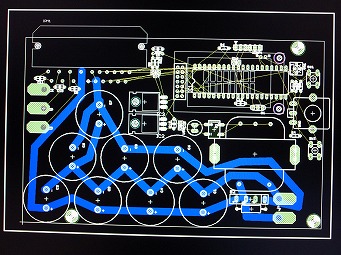
基板一枚にまとめてみた
理想的なコンデンサのTANδ(タンジェントデルタ)はゼロ。理想コンデンサは電圧と電流の位相が90度ずれるが実際のコンデンサは90度よりTANδだけ余分にずれる。このずれが熱に変わる。
コンデンサ4個に流れる電流の実効値(RMS)は消費電力750Wの時8.7A。820uFのコンデンサを全部で8個使う。コンデンサのTANδはデータシートから120Hzのとき0.15。TAN 0.15は角度にすると約8.5度。意外と大きい。ESR(コンデンサの直列抵抗成分)はTANδ/(2*π*f*C)=0.15/(2*3.14*120Hz*820uF/1000000)=0.24Ω。コンデンサ1個あたり8.7/4アンペア流れるので発熱量はI^2*R=(8.7/4)^2*0.24=0.97W。コンデンサは全部で8個なので8Wも消費する計算になる。
2013-05-03
IPMが届いた。これは基板と平行に実装するタイプ。垂直の物もあるが薄型の金属ケースに直接熱を逃がすなら平行の方がやりやすい。

2013-05-30
プリント基板を作る

ラミネーターで転写
トナーが薄くてかなり修正が入った。たぶんトナーの残量が少ない
2013-06-02
モーターは唸るだけで回らず。コンデンサを買っていないので電源は試作1号機から取っている。
2013-06-04
dsPICからは正しくPWM制御信号は出ている
SVMの波形はSINEカーブでは無く階段状に見える
ブートストラップコンデンサの容量が少ないのかと思ったが問題ない感じ。

4.7+10μF
コンデンサの電圧。1桁Hzの低周波波形になっている。原因は不明
誘導負荷だと波形が分かり難いので抵抗負荷にして観測。ソフトを修正して各アームを個別に制御して見たがIGBT(IPMの中に6個入っている)の出力が予想通りにならない。W相のハイサイドだけは正しく動いている感じなのだが他がダメ。SVM波形で駆動すると3つの抵抗は全部熱くなる。W相のハイサイドだけしか動いていないなら抵抗は熱くならないはず。結果が矛盾する。IPMを交換してみたが状況変わらず。IR2110+IGBTのデスクリート回路に変更してみようか。
3相インバーターのハイサイド/ローサイド6個の半導体スイッチをアームと呼ぶ。一組のハイサイド/ローサイドのアームをレグと呼ぶ。3相ならレグは3つ、Hブリッジならレグは2つ。アームという言葉はいろいろなところに書いてあるがレグの方はあまり使われていない感じ。
100Ω 3個
2013-06-05
IPMだとIGBTのゲートにオシロのプローブを当てられなくてお手上げになるということが解ったのでこれで行くことにする。IGBTはまだ秋月で売っていないがMOUSERやdigikeyでは1個¥100程度で入手できる。IGBTは一番安いのを購入。IPMの場合これに加えてスナバ回路まで入っているのでデスクリートで作ると倍額で実装面積が約3倍
IR2110とSTマイクロのIGBT GF6NC60HD
2013-06-11
デスクリート回路は格段に配線がやりにくい。電圧が高いのでパターンがあまり太くなくても大電力を扱えるがクリアランスは大きめにする必要がある。
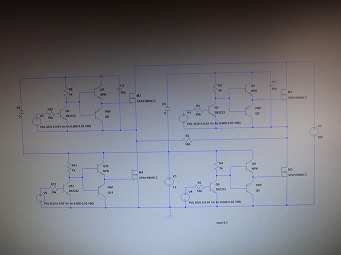
2013-06-12
IR2110版回路図。整流器は乗らなかったので基板の外。IR2110を使うと弱電のGNDとAC100VのGND(厳密に言うとDC280VのGND)が繋がる。弱電回路を触っても感電する可能性有り。反面、電流検出がシャント抵抗で出来る利点がある(この回路図は電流検出は省略してある)。フォトカプラを使うと弱電とAC100Vを絶縁出来るが電流検出はCTセンサーを使わないといけなくなる。
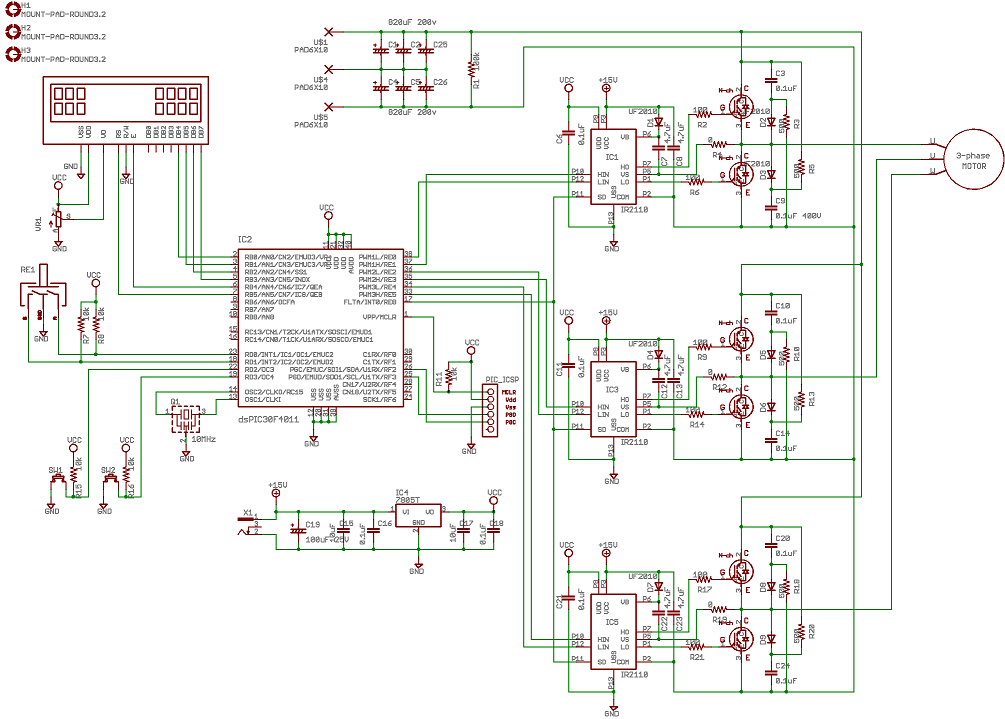
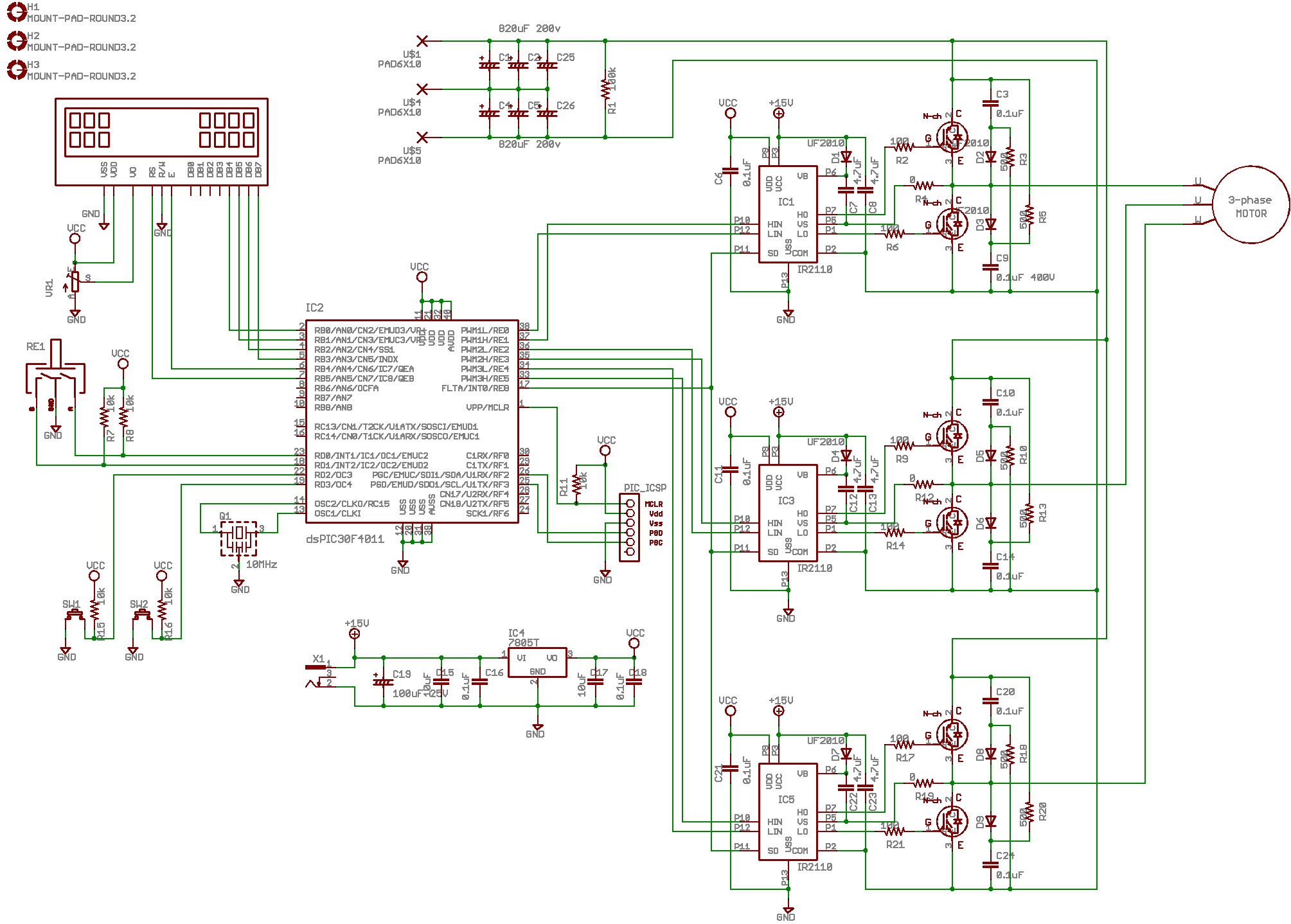{kind=link}
2013-06-13
基板を作る
サイズは160x100 片面基板なので若干未配線が残る
Press-n-Peelに回路図を印刷してしまった
フラックスを吹いて乾燥中
2014-02-13
半年以上放置してしまったのでプログラムを何処に置いたのかすら忘れている。回路構成も忘れているので少しずつ組み立てて動作確認する。先ずはU相単体で実験
2014-02-14
モーター電源DC20Vでテスト。プログラムはIPM用を数行だけ変更して実行。SHUTDOWN関連のピン動作が異なるのでそれだけを変更。問題なく動作する。IPMが動作しなかった原因はプログラムには無かったことになる。次は高電圧でのテストなので机の上を整理してから。スナバ回路はまだ実装していない。これは一番最後にやる。

2014-02-17
高いdsPICが飛んだ。1個しか買わなかったので代わりが到着するまで中断。原因不明なのでまた飛ぶかもしれない